 International Defense Security & Technology Your trusted Source for News, Research and Analysis
International Defense Security & Technology Your trusted Source for News, Research and Analysis
Related Articles
US military is facing increasingly Anti-access /Area denial environment, a set of overlapping military capabilities and operations designed to slow the deployment of U.S. forces to a region, reduce the tempo of those forces once there, and deny the freedom of action necessary to achieve military objectives . Unmanned Air Systems (UAS) have become essential capability in modern militaries for wide range of missions including 24/7 battlefield surveillance, electronic warfare, combat search and rescue, and dropping precision weapons. UAVs are ideal fit for risky military missions, however most of the current inventory of Unmanned Aerial Systems are not not well-matched in A2/AD environment against more technologically advanced enemies who present higher levels of threats, contested electromagnetic spectrum and relocatable targets, according to DARPA.
Since fully autonomous UAS are still far off, the US Army has developed concept of Manned-unmanned teaming (MUM-T) for operation in A2/AD environments. Through MUM-T operations they expect to combine the strengths of manned and unmanned platform to increase situational awareness, allowing the armed forces to conduct operations that include combat support and intelligence, surveillance, and reconnaissance (ISR) missions. Today, users are harnessing these capabilities to extend the reach of their manned platforms as part of MUM-T. The teaming theory allows the man-in-the-loop to cover additional ground, complete additional actions, and communicate information and actions across the space quickly and efficiently.”
U.S. Army has developed and demonstrated Manned-Unmanned Teaming ( MUM-T ) of a dual-manned AH-64 Apache communicating, collaborating and controlling UAS platforms such as the General Atomics Aeronautical Systems Inc. (GA-ASI) Gray Eagle and Textron Systems’ RQ-7B Shadow. “Unmanned systems extend the breadth of a human system’s comprehension of their surrounding environment,” Finneral says. “This enhanced understanding enables more informed decision quality, which in turn leads to more synchronized, responsive actions.
This teaming theory also provides a level of safety for the manned platform. While the Shadow provides the forward scout mission, the soldier remains in a protected, nonhostile area until targets are identified and enemy positions are known.” Manned-Unmanned Teaming was recently used with great success in Afghanistan by the 1-229th Attack Reconnaissance Battalion, Army officials said. The Army is trying to determine what products, research, operational concepts and mission support exists that could enhance existing manned-unmanned teaming concepts, according to a notice published May 17 on the government’s contracting website.
MUM-T can be described as a new combat strategy. It could enhance tactical SA and the lethality of the manned platforms while improving their survival chances. It is a relatively new technology which aims to synchronize the employment of the actors involved (soldiers, manned and unmanned air and ground vehicles, robotics and sensor). The innovative concept of action could revolutionize the planning and conduct of warfare in the future.
The U.S. Army views manned-unmanned teaming (MUMT) as a critical capability. “Today’s force includes a diverse mix of manned and unmanned systems. To achieve the full potential of unmanned systems, DoD must continue to implement technologies and evolve tactics, techniques and procedures (TTP) that improve the teaming of unmanned systems with the manned force,” said Unmanned Systems Integrated Roadmap FY2011-2036.
Manned Unmanned (MUM) Teaming
During the 2013 MUM-T Strategy Brief, the United States Army Aviation Centre (USAACE) defined MUM-T as: ‘The synchronized employment of soldier, manned and unmanned air and ground vehicles, robotics, and sensors to achieve enhanced situational understanding, greater lethality, and improved survivability.’ Donald Woldhuis and Michael Spencer explain MUM-T as ‘a standardized systems architecture and communications protocol that enables live and still images gained from the sensor payloads of Unmanned Aerial Systems (UAS) to be shared across a force’. Through the use of sophisticated data links, MUM-T lets the manned platforms connect with UAS at different Levels of Interoperability (LOI). This makes it possible for both manned aircraft and ground forces to share the UAS’s products. This opportunity may enhance decision-making and mission effectiveness, offering new different tactical chances which could make a difference in the development of future strategies. In simple terms, MUM-T offers a new LOI between ground forces, manned aircraft, and UAS.
The US Army launched a manned-unmanned aircraft teaming demonstration programme in March 2019 which is intended to help rotorcraft pilots better coordinate with autonomous drones in combat. Called the Advanced Teaming Demonstration Programme (A-Team), manned-unmanned teaming systems that are engineered could be installed on the service’s new Future Vertical Lift aircraft. Those aircraft include the US Army’s proposed new scout rotorcraft, called Future Attack Reconnaissance Aircraft (FARA); a new medium-lift utility rotorcraft, called Future Long Range Assault Aircraft (FLRAA); and a new drone, called the Advanced Unmanned Aircraft System (AUAS), the service says in an online notice. The US Army also is interested in retrofitting its legacy fleet of helicopters with the manned-unmanned technology.
The AH-64E is highly mobile, lethal and can destroy armor, personnel and material targets in an obscured battlefield conditions at ranges out to 8-kilometers, an Army statement said. The AH-64E is engineered such that aircraft can have the power, performance and landing abilities of earlier version with a much lighter weight making it more maneuverable and effective. It has a better engine that delivers 3,400 shaft horsepower compared to its predecessor’s 2,854. It has a new gearbox, an improved drive system and is lighter on fuel, meaning it can go further as well as faster.The AH-64E Apache is also 20 knots faster than the previous model and can reach speeds of 164 knots.
MUM allows manned aircraft work with unmanned systems like for example Airforce MQ-1 predator. In Afghanistan Apache helicopter crews were helped by drones in some 60 percent of direct fire missions. Apache crews were able to see full motion of videos of areas they were flying into or enemies they were being sent to attack well before they reach their destination. MUM-T allows Apache flight crews to tap into the real-time video feeds, sensors and control systems of nearby Army Shadow and Grey Eagle drones. Army officials say the combination of the Apache’s lethal weapons and the drones’ sensors enable helicopter crews to find and go after dynamic or fast-moving targets from further ranges.
AH-64E crews can also take control of and aim a Grey Eagle’s sensors, a form of MUM-T known as LoI 3, for Level of Interoperability 3. Davis said his crews also did that, but less frequently. He added that, in training before they deployed but not in Afghanistan, his Apache Echo crews also practiced teaming with Grey Eagles at LoI 4, in which a manned aircraft crew controls the flight path of a drone and can launch its weapons. Level 4 MUM-T allows an Apache copilot gunner to not only receive live sensor imagery from an unmanned aircraft, but also take control of the sensor and weapons payloads and the aircraft navigation via waypoint management, according to Grant Taylor, engineering research psychologist for the Army Aviation Development Directorate.
“Coordinating by radio, the Apache crews also worked with other drones, from small ScanEagles and RQ-7 Shadows to far larger Predators and MQ-9 Reapers, another Predator derivative far larger and more heavily armed than the Grey Eagle or MQ-1,” said Lt. Col. Pat Davis led an Army aviation battalion in Afghanistan last year. The Reaper typically carries four Hellfires and two 500 pound bombs.
The Army Science Board (ASB) conducted a study on “Manned-Unmanned Teaming (MUM-T)”. A MUM-T system consists of a human operator or supervisor interacting with a robotic and autonomous system (RAS) vehicle as a team to achieve defined objectives. Principal objectives of this study include: (1) developing insights into critical MUM-T capability needs and Concepts of Operation (CONOPS) for MUM-T concepts to be operationally effective, and (2) understanding technical, operational and human challenges to satisfy the capability needs and implement the CONOPS. The Terms of Reference (TOR) for the study is provided in the Supplemental Information provided below.
Some challenges need to be addressed, and some problems to be solved before creating a valid and reliable tool for NATO. First, in the development of the technologies applied to MUM-T, particular importance has to be given to the concept of interoperability. The convergence on a common roadmap, by all the countries involved, should represent a valid solution for developing interoperable and connectable systems. This could ensure tactical and strategic advantages for commanders in the future, providing different coupling options between available MUM-T platforms within NATO. Second, the accurate and scientific study of HF and aeromedical issues/risks/threats posed by MUM-T applications are crucial in the design and development of future aircraft. A holistic and comprehensive approach from the involved actors is desirable to face the challenges. An objective analysis of the crew’s workload could be useful in supporting the cockpit design of the new aircraft and driving the development of new HMI concepts. These concepts could help to find the right way to display the essential data needed by the pilots, without exceeding their human limits.
Man-Unmanned Teaming (MUM-T) technologies
MUM-T concepts of interest include those that operate in the ground, air, cyber, electronic warfare (EW) and/or multiple domains. Effective MUM-T operations will be dependent on viable solutions to the following capability needs: resilient communications between human operators and RAS within dense electromagnetic and EW environments; RAS autonomous algorithms for terrain maneuvering, obstacle avoidance, and recognition/identification of targets or other objects of interest; sensors and sensor fusion techniques for developing shared situational awareness (SA) between human and RAS and for providing essential input to the autonomous algorithms; dynamic reallocation of cognitive functions between human and RAS in response to changing operational conditions; and human-RAS interactions for reducing operator cognitive burden and optimizing human-RAS team performance.
The service plans to award funding for manned-unmanned enabling systems which include human machine interfaces, operations management, platform resource capability management and situational awareness management technologies. The US Army anticipates programme participants will begin with technologies at varying Technology Readiness Levels (TRL) and mature many of them to TRL 6 or 7 with potential to transition into advanced component development and prototypes. The service defines TRL 7 as a prototype near or at a planned operational state, which has been demonstrated in an operational environment such as an aircraft, vehicle or space. For example, testing the prototype in a test bed aircraft.
Growth opportunities exist in developing and adopting advanced technologies such as artificial intelligence (AI) algorithms that enable swarming, autonomous flight and automated data-processing and exploitation,” said Michael Blades, research director, Defense at Frost & Sullivan, according to eetimes.com. “Disruptive UAS innovations including autonomous drones, transitional drones and manned-unmanned teaming (MUM-T) capabilities will also drive growth in the market.”
Interoperability
The number of different types of unmanned systems being used in different domains will increase significantly in the future. In the civil sector, for example, it is estimated that the global market related to unmanned aircraft could reach approximately USD 14 billion in 2026, a 300% increase compared to 2017. In this complex and continuously evolving technological scenario, the assurance of interoperability between different manned/unmanned systems available to the NATO community represents a growing problem. UAS are designed and procured nationally. They are usually built using unique and specific systems which do not ensure a common interface.
‘Commonality of hardware and software would be a solution to achieve interoperability, but the commonality is not mandatory’ within the NATO community. The result is an increasing number of non-interoperable systems. NATO responded to interoperability requirements in 2004 by ratifying the first edition of Standardization Agreement 4586 (STANAG 4586 – Standard Interfaces of Unmanned Aircraft (UA) control system (UCS) for NATO UA interoperability), of which edition 4 is currently effective. STANAG 4586 does not provide a complete solution but, as stated by Mário Monteiro Marques in the conclusion of his study: ‘It is certainly a crucial step taken in that direction, providing a roadmap for future development.’ Considering that commonality is not mandatory within NATO, convergence on a common roadmap should represent a valid solution for developing interoperable and connectable systems.
Teamwork enabled by common data link
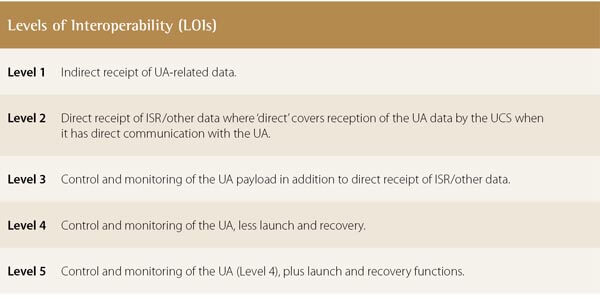
US Army Shadows are typically controlled by soldiers in the Universal Ground Control Station (UGCS) , but Apache pilots can also control the UAVs should it be requested. Ground operators have five levels of control available to them, but an Apache pilot can request a particular level. Level of interoperability (LOI) one has the Apache indirectly receiving payload data; in LOI two the Apache receives payload data directly from the UAV; LOI three means the Apache pilot can fire a UAV missile; LOI four allows the Apache pilot to take over flight control; and LOI five covers the full spectrum, including launch and recovery.
The Manned-unmanned teaming is critically dependent on communication between the two.The MUM-T communication is enabled by Common Data Link (CDL) technology from L-3 Communications.
“CDL technology is the main thread of interoperability for ISR missions [and] the heart of CDL technology is the waveform and the protocol for communications,” says Aurora Taylor-Rojas, director of systems engineering at L-3 Communications. “CDL is the U.S. military’s main protocol for securing imagery and signals intelligence. Interoperability is essential to the manned/unmanned mission. We not only provide the data link equipment for Apache aircraft, but we also provide the data link equipment for the Shadow UAS and the Gray Eagle UAS.”
In addition to the data link, L-3 was awarded the MUMT-X contract and is “currently in the design and development stage of the program and we are close to finishing the design aspects of the contract,” Taylor-Rojas adds. MUMT-X is based on the MUMT-2 system. Its communications suite includes a ROVER 6 modem (see Figure 2), multiband radio frequency equipment, and a directional antenna capable of relaying multiple video streams back to the command center. MUMT-X increases the Apache aircrews’ situational awareness and combat effectiveness, while keeping the decision-making time at a minimum.
L-3 Communications has received a contract to support Manned / Unmanned Communications
L-3 Communications has received a contract to support communications upgrade of the US Army’s AH-64 Apache attack helicopter. Awarded by Science and Engineering Services, the $11.9m contract, L-3 will supply its Manned / Unmanned Teaming – eXpanded Capabilities (MUMT-X) solution to help offer increased communications capacity between the Apache and unmanned systems.
The MUMT-X communications suite features advanced equipment, including a Rover 6 modem, multiband radio frequency equipment, and an innovative directional antenna that can transmit multiple video streams back to the command centre. L-3 Communication Systems president John Mega said: “We are very pleased to have the opportunity to work with the US Army to provide Apache crews with a superior in-theatre communications capability that will give them an important tactical advantage.
Based on the proven MUMT-2 system, the technology is expected to deliver high-speed transmit and receive capability of wideband video and data. The MUMT-2 system provides Apache with the enhanced capability of transmitting both Apache and UAS video to the soldiers on the ground, as well as ship-to-ship.
L-3 engineers use various architectures and technology-refresh methods to maintain performance as requirements change and systems evolve. “As technology rapidly changes, we have implemented the solutions on any variety of custom ASIC (application-specific integrated circuits), programmable commercial FPGAs, COTS (commercial off-the-shelf) components, and/or a hybrid solution,” Taylor-Rojas says. “The architecture of each system and the different requirements of each mission demand different solutions; we choose a best-of-breed approach to custom technology, existing technology, and COTS components in order to give our customers the best value while always meeting the mission needs.
“This equipment will go on an aircraft, so to reduce the SWaP was really important,” she continues. “That’s a careful balance: how to give our customers more functionality while meeting the SWaP requirements for the aircraft. Here we are able to combine older existing technology, bleeding-edge technology, and COTS technology.”
The technology is said to be capable of increasing the Apache aircrews’ situational awareness and combat effectiveness, while shortening decision-making timelines. This combination results in increased survivability of Apache aircrews and ground forces by decreasing their exposure to hostile fire. It also allows for earlier identification of key decision points.
U.S. Army taps Persistent Systems to develop secure comms for robotic and autonomous systems
Persistent Systems, LLC (“Persistent”) announced in feb 2020 that it has been awarded a $5.4M contract by the U.S. Army Combat Capabilities Development Command C5ISR Center to develop Protected Communications for Manned-Unmanned Teams (MUM-T). The Army envisions a next-generation Optionally Manned Fighting Vehicle (OMFV) that can be networked with up to four unmanned Remote Combat Vehicles (RCVs) and their assorted sensor/weapons payloads – and, in turn, networked with the broader force and command structure. For that to happen, these manned-unmanned teams will need a robust, secure, and high-throughput communications network.
“The Army wants RCVs that can be remotely operated in groups over very long distances, in cities, forests, and open terrain,” said Brian Soles, VP of Business Development for Persistent. “These manned-unmanned teams will also have to deal with the threat of enemy hacking and jamming.” The MPU5 with its Wave Relay® MANET was previously selected by the Next Generation Combat Vehicle cross functional team (NGCV-CFT) and the Ground Vehicle Systems Center (GVSC) as the MANET network of choice for RCV Phase 1 and has been under evaluation by the U.S. Army for over a year.
Persistent is a leader in the mobile ad hoc networking (MANET) domain. Its MPU5 forms a highly scalable, peer-to-peer network that does not rely on external communications infrastructure to operate or run through a vulnerable central node. The MPU5, which has already been deployed on a variety of unmanned platforms, has:
An onboard Android™ computer, that hosts and runs command-and-control and situational awareness software; A 3×3 MIMO configuration with up to 10 watts of transmit power, providing a usable throughput exceeding 100 Mbps; and a Built-In HD Video Encoder/Decoder to distribute multiple real-time HD video feeds to team members on demand. As part of its 14-month-long contract, Persistent is working with the C5ISR Center’s Space and Terrestrial Communications Directorate to adapt the MPU5 to meet the anti-jam and cyber hardening demands of MUM-T operations.
“The application of the work done under this contract won’t be limited to vehicles,” Soles said. “The idea is to get these same hardened capabilities to dismounted soldiers, which will greatly enhance our ability to operate against more sophisticated adversaries.” The development initiatives on this contract are already underway and will continue through 2020.
Future Enhancements
Moving forward, the biggest challenges are “increasing autonomy, reducing workload, and manpower,” he continues. “Those are three key areas coming next. There is a very high pilot workload with MUM-T operations. “We want to build into the system the autonomy or artificial intelligence (AI) so that it can do the simple tasks itself and the crew only has to act if something is wrong, or a ‘management-by-exception’ system,” McFarland explains. “We are putting the burden on the system to reduce the workload. Current planned and future capability enhancements can potentially provide weapons support, passive and active electronic warfare, signals and intelligence, communications support, and counter-IED (improvised explosive device) detection.”
Regarding communications, McFarland says “we need to get more on the expeditionary side and start working on options to [enable] satellite communications for beyond-line-of-sight cases. There is also emerging technology for using nano-UASs, along with countering other UAS technologies.”
Textron Systems engineers are working on qualification of several new enhancements to the Shadow system. The V2 “will soon be configured with high-definition, full-motion video (FMV) payloads, improved environmental performance, and enhanced reliability features on the data link and propulsion systems,” Finneral says. Other enhancements the company is developing include system survivability and a more powerful power plan, he adds. “The new enhancements that are currently in qualification will be introduced to the fleet starting in the fall, while the enhancements that are in development will be brought forward in the next several years,” Finneral notes.
As the MUM-T concept evolves, nothing will be more important than maintaining security. “The technology is actually not new,” McFarland says. “The technologies that enable interoperability are radios and data links. The issue is that there’s always a need for increased bandwidth, quality, and data security. The biggest challenge is to keep it secure. As we build more capabilities in those areas, we have to be cognizant of those requirements. However, we’ve already had interoperability with systems like Link 16 and some other waveforms. It’s not new, but it’s about making them better and faster, and it’s about keeping it protected.”
Human Factors and Aeromedical Challenges
Task saturation and excessive workload may become a serious problem for pilots of manned platforms, when teamed with a UA, performing a MUM-T mission. In 2015 the United States Army Aeromedical Research Laboratory (USAARL) focused on this issue and conducted a study analyzing Human Factors (HF) and aeromedical challenges which could be posed by MUM-T applications. The study highlighted the absolute necessity of remaining vigilant. As indicated by USAARL, some of the possible problems that pilots might face when operating in MUM-T mode include visual overload, increased workload, task saturation, distraction and decreased ‘flying’ SA, as well as motion sickness.
Moreover, USAARL warns that processing conflicting sensory information (between aerial platform motion cues and UA orientation), and other consequences of increased UA interoperability in the cockpit, may increase the risk of Spatial Disorientation (SD). The USAARL distinguishes between ‘battlefield’ or ‘target’ SA, and ‘flying’ SA. MUM-T could increase the first, but USAARL raises the fundamental question that this might result in decreased ‘flying’ SA, as a cost. In light of the above, the aviation medical community should be involved, more than ever, in the development cycle of future MUM-T capable aircraft, providing, guidance, and expertise. Analyzing HF and aeromedical challenges posed by MUM-T applications, it would be desirable to have a holistic and comprehensive approach to involve the essential actors: not only aviation medical community but also the scientific community, research entities, and industry.
In 2012 Tobias Paul and Emanuel Brämer investigated the MUM-T concept and highlighted the necessity of additional and enhanced systems in the cockpit of the manned platforms, to allow successful teaming with a UA. The systems should reduce the pilot workload to an acceptable level while providing them with appropriate SA. Enhanced HMI for task assignment, presentation of UA status, and presentation of task results, was one of the crucial components to be realized.
In this context, the Helicopter Division of Leonardo is developing a new objective methodology which can evaluate the effectiveness of the HMI called Infrared Stress Monitoring System (ISMS). This project is ‘aimed at validating metrics based on psycho-physiological indexes, to evaluate the real-time objective crew workload throughout their cognitive and stress behaviour and indexes’. Recognizing and mitigating the potential for performance degradation, errors, and accidents caused by HF and aeromedical risks has always been paramount in aircraft design and development. This perspective is particularly relevant in the development of MUM-T technology applied to manned aerial platforms. Exploring new methods of HMI which facilitate natural and efficient interaction, while reducing pilot workload as much as possible, could represent a truly essential element in the evolution of the new/next generation of MUM-T capable aircraft.
References and Resources also include:
https://www.japcc.org/manned-unmanned-teaming/