Digital battlefields, hybrid warfare, and the future of threat intelligence
IDST Intelligence Briefings
(Latest Security & Cyber Videos)
Why This Magazine Exists
Security, Cyber & Counter-Threats examines the evolving landscape of modern security in an era defined by digital conflict, hybrid warfare, and persistent global threats.
From cyber operations, information warfare, and intelligence-driven defense to counter-terrorism, internal security, and emerging threat vectors, this magazine provides strategic analysis, technical insight, and policy-relevant perspectives for decision-makers, practitioners, and researchers navigating an increasingly contested security environment.
What We Track
- Cyber warfare & cyber defense
- Information operations & influence campaigns
- National security threat assessments
- Emerging digital and hybrid warfare doctrines
- Critical infrastructure & cyber resilience
Latest Analysis & Intelligence
-
Beyond Qubits: How Qudits Are Opening New Dimensions in Quantum Computing
For decades, the narrative of quantum computing has revolved around a single protagonist: the qubit. The concept is elegant and transformative—a quantum bit capable of existing as both 0 and 1 simultaneously, enabling computational possibilities far beyond classical machines. Yet nature itself is not confined to two states. Quantum systems inherently possess multiple measurable states,…
-
Beyond the Hype: How Digital Technology Drives Breakthrough Innovation (2026 Global Strategic Update)
Introduction: The Digital Innovation Paradox For more than a decade, governments and corporations have operated on a seemingly obvious assumption: more digital technology automatically produces more innovation. Enterprises invested aggressively in artificial intelligence, cloud computing, big data analytics, blockchain platforms, industrial IoT systems, and digital twins expecting breakthrough products and disruptive business models to emerge…
-

The Digital Air War: How Next-Generation Air Operations Centers Are Rewiring Global Command and Control
In the darkened heart of an Air Operations Center, hundreds of screens flicker with real-time data flowing in from across the globe—satellite imagery, radar tracks, intelligence feeds, refueling schedules, targeting data, and strike coordination updates. For decades, the men and women responsible for commanding the air battle have operated within this complex environment, surrounded by…
-
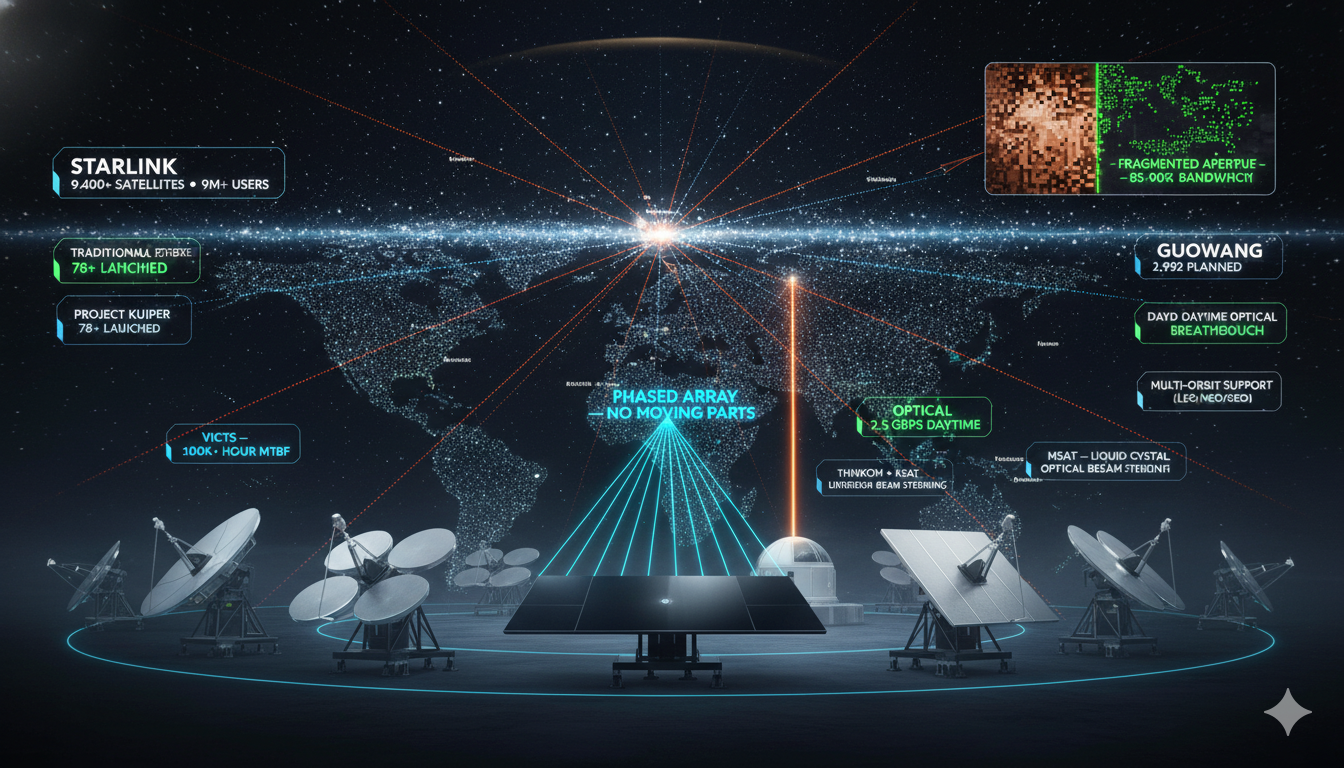
Ground Station Antenna Innovations: Enabling the New Space LEO Constellation Era
From Mechanically Steered Dishes to Software-Defined, Electronically Steered, and Optical Ground Systems Executive Introduction The emergence of the New Space ecosystem is fundamentally reshaping the architecture, economics, and operational dynamics of the satellite industry. At the center of this transformation is the rapid proliferation of Low Earth Orbit (LEO) constellations—massive networks of hundreds to tens…
-

Chasing Shadows: The Global Quest to Catch Interstellar Objects
How the Search for Interstellar Visitors Is Reshaping Space Science, Propulsion Technology, and Strategic Exploration Introduction: Messengers From Other Star Systems The arrival of interstellar visitors in our solar system has opened a new frontier in astronomy and planetary science. For centuries, humanity has studied distant star systems only through telescopes, interpreting faint signals of…
-
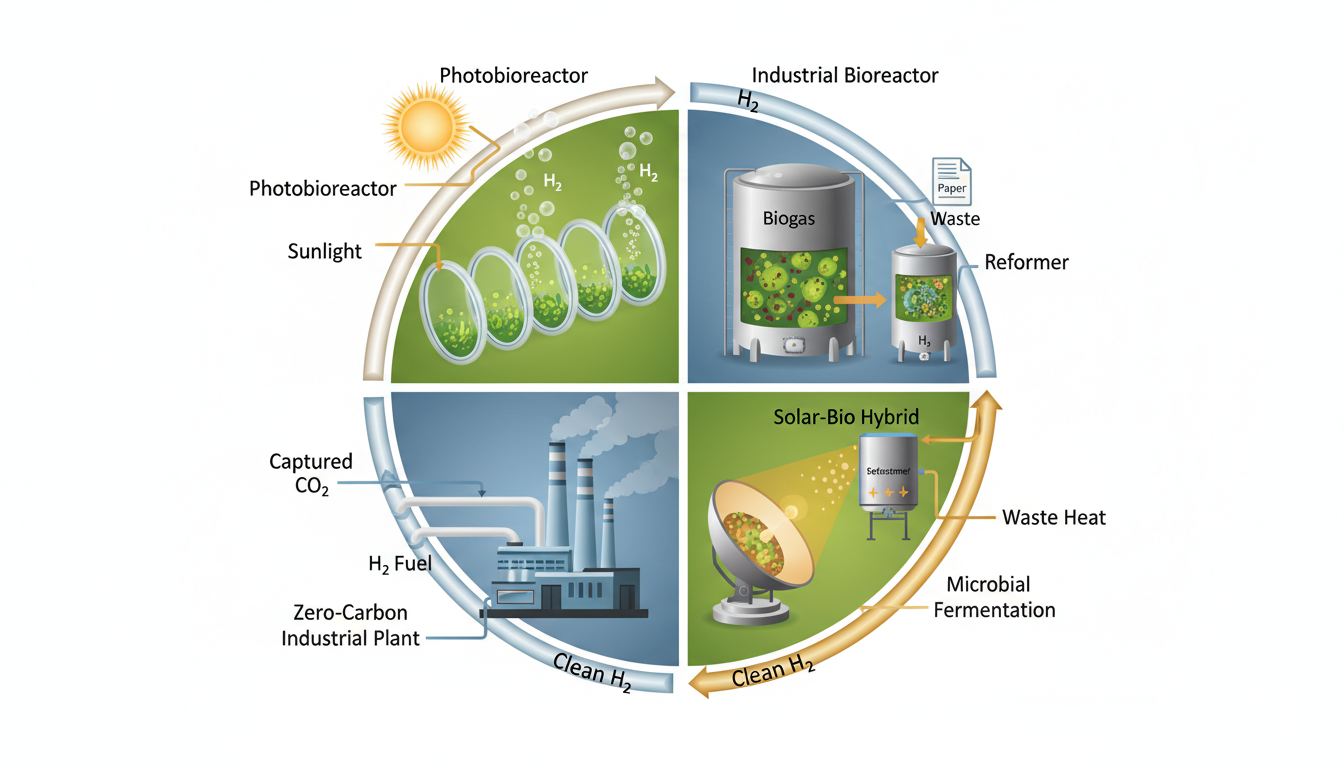
From Algae to Nanoreactors: The New Wave of Biological Hydrogen Production
Introduction: Hydrogen at the Center of the Clean Energy Transition As the global energy system accelerates its transition toward low-carbon alternatives, hydrogen has emerged as one of the most promising fuels for deep decarbonization. Hydrogen is particularly important in sectors that remain difficult to electrify, including steel production, heavy transport, maritime shipping, and chemical manufacturing.…
-

Nigeria’s Digital War 2026: AI, Drones, Space Surveillance and the Strategic Transformation of Counterterrorism
Historical Context: The Long Road to 2026 Nigeria’s conflict with Boko Haram began in 2009 as a violent Islamist insurgency aimed at establishing a radical Islamic state in northeastern Nigeria. Over the following years, the group evolved into one of the world’s deadliest terrorist organizations, carrying out mass killings, bombings, kidnappings, and attacks on schools,…
STRATEGIC SUB-MAGAZINES
Modern military power emerges from the interaction of platforms, people, doctrine, and integration across domains. The Defense & Military Systems magazine is structured into focused sub-magazines that examine how combat capability is built, sustained, and employed across air, land, sea, weapons, and human systems.
Cyber & Information Warfare
Industrial outcomes are shaped as much by incentives, policy, and market structure as by engineering. Price signals, investment cycles, and regulatory frameworks quietly determine which technologies scale, stagnate, or fail.
This sub-magazine examines how markets behave under strategic pressure—where capital flows, how demand signals distort decisions, and why some industries adapt faster than others.
Explore the Cyber & Information Warfare Sub-Magazine →
Security & Threat Management
Modern security is defined by persistence, coordination, and anticipation. This sub-magazine focuses on how threats are identified, mitigated, and managed across institutions, infrastructures, and societies.
Explore the Security & Threat Management Sub-Magazine →