 International Defense Security & Technology Your trusted Source for News, Research and Analysis
International Defense Security & Technology Your trusted Source for News, Research and Analysis
Related Articles
Introduction:
In the relentless pursuit of innovation, the Defense Advanced Research Projects Agency (DARPA) has set its sights on transforming military ground operations through autonomous technologies. At the forefront of this initiative is the Robotic Autonomy in Complex Environments with Resiliency (RACER) program, a groundbreaking effort aimed at developing and demonstrating autonomy technologies for unmanned ground vehicles (UGVs). In this article, we explore the significance, challenges, and promising advancements brought forth by DARPA’s RACER program.
The Vision for Autonomous Ground Vehicles:
Modern warfare demands innovation, and autonomy in ground vehicles has become a focal point for military strategists. Autonomous ground vehicles offer the potential to enhance battlefield efficiency, reduce risks to human operators, and navigate complex and unpredictable environments with agility. DARPA’s RACER program stands as a response to this need, aiming to advance autonomy algorithms for military ground vehicles operating in diverse and challenging terrains.
Recognizing the potential of autonomous ground vehicles in enhancing military capabilities, DARPA envisions a future where these vehicles operate at speeds that match or exceed those driven by human operators. The RACER program, initiated in October 2020, aims to disruptively advance the integration of autonomy for robotic combat vehicles within the Army, Marine Corps, and Special Forces communities.
Overcoming Operational Challenges:
While the self-driving car industry has made significant strides, military settings present unique challenges. Unlike well-structured and predictable environments, complex and dynamic terrains require a different level of autonomy.
Developing robust and reliable autonomy for UGVs in complex environments is no easy feat. The battlefield throws up a multitude of challenges, including:
- Unpredictable terrain: From steep hills and loose soil to dense vegetation and hidden obstacles, the battlefield is far from a smooth highway.
- Dynamic situations: Enemy fire, changing weather conditions, and unforeseen events require quick decision-making and adaptation.
- Sensor limitations: Cameras, radars, and other sensors can be hampered by dust, smoke, and other environmental factors.
DARPA, in collaboration with selected teams, is addressing this challenge through the RACER program by focusing on off-road autonomy for combat vehicles, ensuring they can navigate diverse and unpredictable landscapes while maintaining operational efficiency.
DARPA’s Approach to Autonomy:
The RACER program is not just about developing autonomy algorithms; it’s about pushing the boundaries of what autonomous combat vehicles can achieve. DARPA is actively working on creating simulation environments that replicate off-road terrains, allowing research teams to test and validate their autonomy stacks efficiently. This approach minimizes the need for extensive field testing while ensuring that the developed algorithms can handle the complexities of real-world scenarios.
RACER Program Objectives:
The RACER program is focusing on three key areas:
- Advanced perception and sensing: Developing algorithms that can accurately interpret complex sensory data from cameras, LiDAR, and other sensors.
- Robust planning and decision-making: Creating algorithms that can plan safe and efficient routes in real-time, taking into account obstacles, terrain, and tactical objectives.
- Resilience and adaptation: Designing algorithms that can handle sensor failures, unexpected situations, and even attacks.
DARPA’s RACER program seeks to achieve several key objectives:
- Enhanced Autonomy Algorithms: The core focus of RACER is to develop state-of-the-art autonomy algorithms that enable military ground vehicles to navigate, adapt, and make decisions in dynamic and complex environments. These algorithms will go beyond traditional approaches, incorporating resilience and adaptability to unforeseen circumstances.
- Terrain Adaptability: Military operations can take place in a wide range of terrains, from urban environments to rugged landscapes. RACER aims to equip autonomous ground vehicles with the capability to navigate seamlessly across diverse terrains, ensuring operational effectiveness in any scenario.
- Resilience to Disruptions: The battlefield is inherently unpredictable, with potential disruptions ranging from communication interference to adversarial attacks. RACER is working to develop vehicles that can maintain a high level of autonomy even in the face of disruptions, ensuring continuity of operations.
- Collaborative Autonomy: In a networked battlefield, collaboration among autonomous vehicles is crucial. RACER envisions a future where autonomous ground vehicles can communicate and coordinate their actions, optimizing overall mission success.
High-Performance RACER Fleet Vehicles:
A key milestone in the RACER program is the development of RACER Fleet Vehicles (RFVs), high-performance all-terrain vehicles equipped with advanced sensing and computational capabilities. These RFVs serve as the testing ground for the autonomy stacks developed by participating teams. With features like LIDARs, stereo camera pairs, RADAR, and more, these vehicles collect vast amounts of sensor data to support artificial intelligence and machine learning-based autonomy algorithms.
Progress and Challenges Ahead:
The RACER program has already completed its first experimental phase, demonstrating the autonomous capabilities of combat vehicles on challenging terrains. In October 2022, three teams demonstrated their UGVs at Fort Irwin, California, navigating a challenging course designed to mimic real-world battlefield conditions. The next phase of the program will see further refinement of the algorithms and continued testing in more complex environments. Experiment 2, will push the boundaries further, testing perception algorithms on larger, steeper hills and stressing the vehicles’ ability to navigate diverse obstacles at higher speeds.
Three prominent teams who participated in Phase 1 of DARPA RACER and potentially contributed to the winning technology:
1. Carnegie Mellon University: Led by Professor Manuela Veloso, CMU’s team focused on robust perception and planning algorithms for off-road navigation, leveraging their expertise in artificial intelligence and robotics.
2. NASA-Jet Propulsion Laboratory: This team, led by Dr. Aaron Ames, brought their experience in automated space rover control and robust planning algorithms to the table, aiming for reliable performance even in unpredictable environments.
3. University of Washington: Professor Emilio Frazzoli led UW’s team, which emphasized optimization and control algorithms for high-speed off-road driving, seeking to maximize UGV maneuverability and agility.
Beyond these three main participants, DARPA RACER likely involves collaborators from various sectors, including:
- Other academic institutions: Research teams specializing in AI, robotics, sensor technology, and control systems may have contributed expertise or participated in pilot studies.
- Defense contractors and technology companies: Firms with experience in developing military platforms, sensors, and software for UGVs could be potential partners for scaling up the technology to real-world applications.
- Government agencies: Collaboration with entities like the Army Research Laboratory or the Office of Naval Research could facilitate integration of RACER technologies into existing military programs and infrastructure.
Here are some of the latest developments in the DARPA RACER program:
Phase 1 Completion and Key Achievements:
- The first phase of RACER concluded in April 2023 with a final experiment at the National Training Center in Fort Irwin, California. In this phase, three participating teams (Carnegie Mellon University, NASA-Jet Propulsion Laboratory, and University of Washington) successfully demonstrated their autonomous UGV platforms navigating a five-kilometer course with varied terrain and challenges.
- During the phase, RACER achieved significant breakthroughs in off-road autonomy, including:
- Increased vehicle speeds while maintaining situational awareness and decision-making capabilities.
- Improved perception and understanding of complex environments through sensor fusion and robust algorithms.
- Enhanced resilience to sensor failures and unexpected situations, ensuring continued operation even under duress.
Phase 2 Kickoff and Focus:
- Phase 2 of the program commenced in September 2023. Currently, a single winning team (likely chosen from the Phase 1 participants) is working on maturing their software stack and adapting it to a larger-scale demonstration platform, representative of a combat-grade UGV.
- In this phase, the focus is on:
- Scaling up the autonomous capabilities to handle longer courses and more complex tactical scenarios.
- Integrating the algorithms with advanced hardware and sensor suites on the larger UGV platform.
- Conducting rigorous testing and evaluation in diverse real-world environments that represent potential battlefield landscapes.
Additionally:
- DARPA released a report summarizing the results of Phase 1, highlighting the technical advancements and challenges encountered.
- The agency continues to emphasize the importance of responsible development and ethical considerations regarding AI and autonomous weapons systems.
- Collaborations with other government agencies and industry partners are being explored to ensure the eventual transition of RACER technologies into practical military applications.
Looking Ahead:
Overall, the DARPA RACER program continues to make significant progress towards its goal of revolutionizing off-road autonomy for military UGVs. As the RACER program advances, the goal is to evolve into a Phase 2 effort with more representative combat vehicle surrogates. This includes increasing speed, scale, and mobility beyond RFVs, addressing challenges associated with varied terrains and obstacles.
As Phase 2 unfolds, we can expect to see even more impressive demonstrations of autonomous capabilities and closer integration with real-world military scenarios.
The program aims to lay the foundation for a new era in military ground operations, where autonomous combat vehicles play a pivotal role in ensuring speed, resilience, and efficiency on the battlefield.
Implications for Military Operations:
The successful implementation of the RACER program could have profound implications for military operations:
- Reduced Human Risk: Autonomous ground vehicles equipped with advanced autonomy algorithms can undertake dangerous tasks, minimizing the exposure of human operators to potential threats.
- Increased Operational Efficiency: With the ability to adapt to diverse environments and navigate complex terrains, autonomous vehicles can contribute to heightened operational efficiency, particularly in reconnaissance and logistics.
- Adaptability to Dynamic Threats: RACER’s focus on resilience and adaptability ensures that autonomous vehicles can respond effectively to dynamic and evolving threats on the battlefield.
- Improving logistics and support: UGVs can efficiently transport supplies and provide support to troops on the ground.
The success of DARPA RACER could pave the way for a future where autonomous UGVs play a vital role in military operations. These versatile vehicles could perform reconnaissance, provide close-fire support, and even carry troops into battle. While ethical considerations and responsible development are paramount, the potential benefits of RACER are undeniable. It’s a race to the future of battlefield autonomy, and DARPA is leading the charge.
Conclusion:
DARPA’s RACER program represents a significant stride toward the integration of autonomous ground vehicles into military operations. By developing cutting-edge autonomy algorithms, RACER aims to enhance the capabilities of military ground vehicles, making them more adaptable, resilient, and efficient on the modern battlefield.
By advancing the autonomy of combat vehicles in complex environments, RACER has the potential to revolutionize military ground operations. As the program progresses into future phases, the collaboration between government agencies, research teams, and industry partners will be instrumental in shaping the future of autonomous warfare. By advancing the autonomy of combat vehicles in complex environments, RACER has the potential to revolutionize military ground operations. As the program progresses into future phases, the collaboration between government agencies, research teams, and industry partners will be instrumental in shaping the future of autonomous warfare.
The Army believes self-driving vehicles could be ideal during humanitarian relief missions in a natural disaster or for resupplying troops in the field, recognizing opportunities for cost savings and fewer crashes.
Autonomy-enabled systems will deploy as force multipliers at all echelons from the squad to the brigade combat teams. Future robotic technologies and unmanned ground systems (UGS) will augment Soldiers and increase unit capabilities, situational awareness, mobility, and speed of action. Artificial intelligence will enable the deployment of autonomous and semi-autonomous systems with the ability to learn. Decision aids will reduce the cognitive burden and help leaders make rapid decisions.
Driverless technology could reduce the risk of injury or death for convoys traveling through territory with hidden roadside bombs, said Bernard Thiesen, technical manager for Autonomous Mobility Applique Systems at TARDEC.
The self-driving car industry has made great autonomy advances, but mostly for well-structured and highly predictable environments. In complex militarily-relevant settings, robotic vehicles have not demonstrated operationally relevant speed and aren’t autonomously reliable. While vehicle platforms that can handle difficult terrain exist, their autonomy algorithms and software often can’t process and respond to changing situations well enough to maintain necessary speeds and keep up with soldiers on a mission.
“Unlike the commercial sector, we have to develop systems that can manoeuvre off-road, that can manoeuvre in all elements…. that can navigate obstacles, whether they be trees or gullies or rocks or whatever they may be,” US Secretary of the Army, Mark Esper said. Earlier, Michael Griffin, the undersecretary of defense for research and engineering had claimed that United States Army will have self-driving vehicles operating on the battlefield long before they’re on U.S. streets and highways, “But the core technologies will be the same.” “At a minimum, performance at par with a human driver should be achieved.”
DARPA launched Robotic Autonomy in Complex Environments with Resiliency (RACER) program in Oct 2020 with aim to make sure algorithms aren’t the limiting part of the system and that autonomous combat vehicles can meet or exceed soldier driving abilities. Over a four-year timeline, RACER will develop new algorithm technologies that maximize utilization of the sensor and mechanical limits of Unmanned Ground Vehicles (UGVs) and constantly test these algorithms in the field at DARPA-hosted experiments across the country on a variety of terrain. DARPA will provide advanced UGV platforms that research teams will use to develop autonomous software capabilities through repeated cycles of simulations and tests on unstructured off-road landscapes.
“In order to achieve RACER goals of increased speed and resilience, we need to embrace learning approaches that automatically tune system parameters in real time,” said Stuart Young, program manager leading the RACER project. “Successful software will extract features from sensor data and use that information to make on-the-spot driving decisions.”
RACER program goals include not only autonomy algorithms, but also creation of simulation environments that will support rapid advancement of self-driving capabilities for future UGVs. DARPA is slated to provide advanced UGV platforms research teams will use to develop autonomous software capabilities through repeated cycles of simulations and tests on unstructured off-road landscapes. Over a span of four years, RACER would develop new algorithm technologies maximizing utilization of the sensor and mechanical limits of UGVs while consistently testing the algorithms in the field at DARPA-hosted experiments nationwide on a variety of terrain.
The Army Reseach Lab has also been focusing on algorithms to advance UGVs. Researchers from ARL and the University of Texas at Austin are working on a suite of algorithms, libraries and software components that intelligent systems can use for navigation, planning, perception, control and reasoning when performing specific tasks. The goal is to teach ground robots to learn by doing, rather than responding to verbal commands, which will improve how autonomous systems move through rugged and unfamiliar terrain.
ARL’s Scalable, Adaptive and Resilient Autonomy program is looking to improve how autonomous ground systems travel through increasingly complex off-road environments. Software developed by participants will be integrated into testbed platforms and ARL’s autonomous systems software repository so it will be more broadly available.
DARPA awards
DARPA’s Robotic Autonomy in Complex Environments with Resiliency (RACER) program is picking up speed after three teams were selected to go to the starting line in October 2021. The program is focused on advancing off-road autonomy of combat vehicles and seeks to demonstrate the ability of these platforms to travel at speeds that maintain pace with manned combat vehicles in complex terrain typical of that seen in real situations. Awards for Phase 1 were given to Carnegie Mellon University, NASA-Jet Propulsion Laboratory, and University of Washington.
The DARPA RACER program’s goal is to develop and demonstrate autonomy technologies that enable unmanned ground vehicles (UGVs) to maneuver in unstructured off-road terrain at the limit of the vehicle’s mechanical systems and at, or beyond, human-driven speeds and efficiencies. “RACER is intended to disruptively advance the integration and fielding of autonomy for robotic combat vehicles into the Army, Marine Corps, and Special Forces communities,” said Stuart Young, RACER program manager in DARPA’s Tactical Technology Office.
In November 2021 , the selected teams received the first of the DARPA-provided RACER Fleet Vehicles (RFVs) – a high performance all-terrain vehicle outfitted with world-class sensing and computational abilities – that they are using to develop platform-based autonomy for testing at upcoming DARPA-hosted field experiments.
RFV robots include 360o range and image sensing such as multiple LIDARs, stereo camera pairs, color and infrared imaging cameras, RADAR, event sensors, and inertial measurement sensing. Computation tools have multiple best-of-class graphical processing units (GPUs) in an environmentally protected, shock/vibration proof, and thermally managed Electronics Box (E-Box) that’s specifically engineered for the demands of the RACER high speed, off-road terrain expected in DARPA’s tests.
The sensor and E-box combination currently collects four terabytes of sensor data per hour to support artificial intelligence, machine learning-based autonomy algorithms and stack approaches required of fast-paced combat maneuvers in complex terrain. Modifications for roll protection, sensor/E-box integration, autonomous control, and increased 7kW of power are included in each RFV. The RFVs were integrated by Carnegie Robotics LLC (CRL) and are housed on a Polaris RZR S4 1000 Turbo base drive-by-wire platform.
Four RFVs have been completed, with three already delivered to RACER Phase 1 performers in November 2021. Four more are expected to be built prior to DARPA’s first RACER-hosted field experiment, scheduled for March of 2022 at the National Training Center in Ft. Irwin, California.
DARPA-hosted field experiments will provide the teams with a place to demonstrate the full capability of their autonomy stacks in complex environments. At Ft. Irwin, teams will demonstrate their ability to navigate courses with a variety of terrain and distances up to five kilometers.
To further support software development, DARPA has also collected over 100 terabytes of RFV-based sensor data from more than 500 kilometers of terrain in the Mid-Atlantic and West Coast. Shared with teams and managed within a RACER development tool for efficiency and security, this data will assist with learning approaches. Conceptual government baseline stacks and autonomy architectures will also be provided. They leverage recent products of Combat Capabilities Development Command-Army Research Laboratory initiatives in collaborative robotics, learning, and intelligent systems activities in partnership with basic research university and industry consortia.
The RACER program also has awarded two contracts to develop simulation environments and capabilities to enable development of off-road autonomy algorithms. “The RACER-SIM portion of the program looks to expand current simulation capabilities and physics-based models to support the testing of off-road autonomy in virtual environments,” said Young. “These simulation environments will allow teams to test and validate portions of their autonomy stacks without having to spend large amounts of time and money with field testing.”
The two primes for the RACER-SIM program are Duality Robotics and Intel-Federal.
RACER’s second round of off-road testing
The Defense Advanced Research Projects Agency’s (DARPA’s) Robotic Autonomy in Complex Environments with Resiliency (RACER) program has entered its next experimental phase. The program aims to produce autonomous off-road combat vehicles while traveling at speeds that keep pace with those driven by people in realistic situations.
The teams involved in the program have one experiment under their belts and will focus on even more difficult off-road landscapes at Camp Roberts, California, from September 15-27. Carnegie Mellon University, NASA’s Jet Propulsion Laboratory, and the University of Washington have each developed autonomous software stacks for the DARPA-provided robot systems tested in Experiment 1 earlier this year at Fort Irwin, California.
Experiment 1, executed March-April 2022, involved tests on six courses of combat-relevant terrain. The team completed more than 40 autonomous runs of about 2 miles (3.2 km) each and reached speeds just under 20 mph (32 km/h).
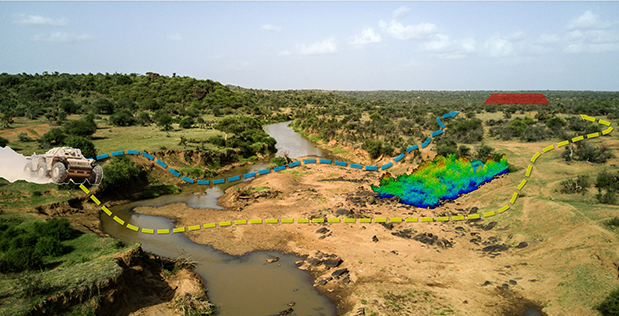
The terrain at Fort Irwin provided a number of obstacles, including rocks, bushes, ditches, etc., that were capable of severely damaging the robotic vehicles. The course also involved the desert environment designed to test the combat vehicles’ ability to identify, classify, and avoid obstacles at higher speeds.
The next series, Experiment 2, will require teams to go beyond the environmental features found in the desert environment to primarily test their perception algorithms on larger, steeper hills. This will also stress the robotic vehicle’s ability to maintain control, particularly going down steep slopes, on slippery surfaces, and navigating ditches over long distances than Experiment 1. The teams must also create longer-range plans amid driving through or around varied obstacles to successfully navigate courses.
Future RACER program activities include continuation into a RACER Phase 2 effort with a more representative 10T combat vehicle surrogate. The plan is to evolve in speed, scale, and mobility beyond the RFVs, as well as add a research track exploring tactics-based derivation of the new platforms
References and Resources also include:
https://gcn.com/articles/2020/09/30/darpa-racer.aspx
https://www.inceptivemind.com/darpa-autonomous-combat-vehicles-take-hills-off-road-testing/27513/
https://www.darpa.mil/news-events/2022-01-13