International Defense Security & Technology Your trusted Source for News, Research and Analysis
International Defense Security & Technology Your trusted Source for News, Research and Analysis
Related Articles
Sonars are one of the primary systems for detection and tracking of submarines in Anti Submarine warfare. However modern nuclear and diesel electric submarines have become very stealthy and quiet. Another challenge is diesel-electric submarines operating in littoral waters which generate high false alarm rates (FAR). One of the ways of overcoming such challenges and detecting stealthy and quiet submarines is Multi static sonar. These systems rely on Network of Active and Passive sonars collaboratively tracking the stealthy targets.
Earlier sonars were of Scanning sonar type which generally had a single transducer that is used for both transmit and receive. When these sonars ping, they generate a single beam (i.e. sound focused in a single direction). When receiving the echoes, these systems are able to produce a single “line” of returns along the direction the beam is pointing. After each cycle, the sonar points to a different direction and repeats the process. They do not offer a complete picture until all the angles have been processed. Eventually, after many pings, the system can scan the entire volume of interest and produce a complete image of the coverage zone.
Phased-array Sonars are designed to electronically change the direction of radio waves without requiring physical antenna movement. Phased array antennas are used for a variety of underwater applications, enabling multiple source emitters to preferentially direct energy toward a desired spatial direction. The beamforming algorithm aligns (phases) signals from individual radiators so that energy from the multiple radiating apertures coherently combines at the desired location with an increased signal level due to the array gain. This reduces power requirements for individual sources and minimizes the amount of energy produced in other directions.
Within the underwater acoustic domain, phased arrays have traditionally consisted of a fixed set of physically connected transmitters, requiring cumbersome cabling, challenging deployment, and the inability to reconfigure the array aperture.
One big advantage of array processing is that the entire volume of interest can be covered with a single transmit/receive cycle. In FarSounder’s FS-3DT product, the software produces approximately 2,400 beams pointing to 2,400 separate angles (~61 horizontal angles by 41 vertical angles) with a single ping. By looking in both vertical and horizontal directions, the software can generate a 3-dimensional image.
In contrast Standard scanning sonars to produce an equivalent 3-dimensional image would require ~2,400 pings. This would be too slow from both the navigation point of view, and underwater Threat Detection requirement.
An alternate approach is to form a distributed source network that is capable of cohering the output from each source to a desired location. This has been explored in other domains such as radar surveillance, radio frequency (RF) communications, and sound localization. A similar
concept for underwater acoustics would provide significant advantages relative to current array capabilities.
DARPA launched Tactical Exploitation of the Acoustic Channel (TEAC) program in 2017 to build phased-array sonar technology compatible with unmanned naval vessels. DARPA officials say they are interested in developing a system with a modest number of independent distributed acoustic transmitters that can increase the signal-to-noise ratio (SNR) and focus the acoustic energy from the transmitters at the receiver. The program seeks to harness advances in undersea vehicles and acoustic source technologies to enable long-duration sonar transmitter payloads on relatively small and affordable platforms.
The ability to cohere several moving sources underwater is very challenging, DARPA officials point out. It requires the ability to estimate the positions of sonar transmitters relative to each other to introduce the appropriate time delay or complex phase.
Such technology also might require channel and motion mitigation, depending on the diversity of the underwater propagation and the motion of sonar transmitters. Experts from STR and APS may use inter-source communications for localization and coordination, but will have to address potential communication delays, DARPA researchers say.
DARPA’s TEAC program
DARPA solicited proposals in 2017 for the Tactical Exploitation of the Acoustic Channel (TEAC) program to develop and demonstrate a phased array formed from a semi-autonomous, distributed network of sources on multiple undersea platforms. DARPA envisions a system with a modest number of independent distributed acoustic transmitters achieving coherent signal addition at a receiver to increase the signal-to-noise ratio (SNR) and focus the acoustic energy. The program seeks to harness advances in undersea vehicles and acoustic source technologies to enable longduration source payloads on smaller, more affordable platforms.
The ability to cohere multiple, moving sources underwater is very challenging. It requires knowledge or estimation of the relative source positions at resolutions comparable to a wavelength to introduce the appropriate time delay or complex phase. Furthermore, channel
mitigation and motion mitigation might also be necessary, depending on the diversity of the underwater propagation and the relative source motion. Inter-source communications may be used for localization and coordination, but potential communication delays must also be
addressed.
If successful, the TEAC program will provide a flexible and scalable source network. The ability to dynamically configure and semi-autonomously cohere multiple sources would have a transformative impact on a number of compelling undersea applications, including active sonar, acoustic surveillance, and underwater communications.
The program was divided into three phaseswith each phase having detailed technical objectives and culminating in at-sea testing. Proposed TEAC testing must demonstrate that the end-of-phase system meets the metrics . DARPA envisions that the tests will involve platforms outfitted with appropriate acoustic sources, communications, and supporting sensor suites. In the initial phase, these platforms will be stationary (i.e., bottom-mounted, tethered, or ship-deployed) but in later phases they will be capable of platform motion to achieve capabilities such as deployment transit, dynamic positioning, and obstacle avoidance. Data collections at a Government designated fixed receiving array will form the basis for the evaluation at the end of each phase.
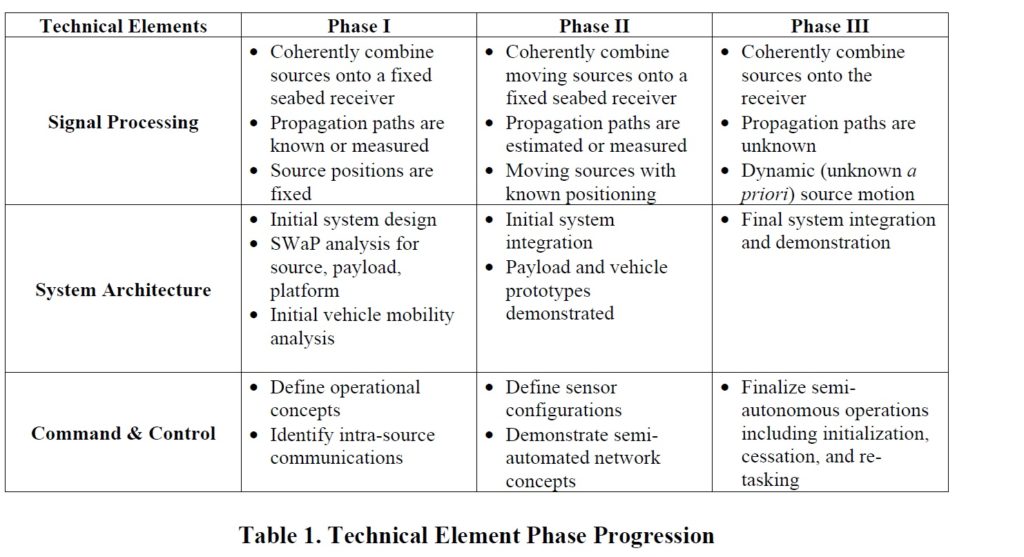
Phase I (18 months). The goal of Phase I is to demonstrate multi-source coherence by a network of fixed sources as measured on a seabed receiver. The sources are required to generate the coherent combination of energy in a narrow frequency band from a moderate distance (5 km). This will require demonstration of the ability to dynamically align (e.g., phase or time delay) multiple (fixed) sources to produce a coherent focus in a specified direction.
Phase II (12 months). The technical focus in Phase II is to demonstrate a network of moving, coherent sources measured on a fixed seabed receiver. The demonstration payload will be integrated onto a platform capable of motion for depth diversity and source positioning; the system concept should consider size, weight, power and cost (SWAP-C) consideration. These sources will emit multiple narrow band waveforms from moderate distances (5-20 km) to produce a focus in multiple directions (i.e., bearing angles). The demonstration requires multisource cohering with channel mitigation and dynamic source position compensation. In addition, the network will need to demonstrate initial Command and Control (C2) capabilities for initialization, coordination and positioning of the network independent of a secondary command vessel.
Technical Elements
The TEAC program’s technical approach comprises three main development areas: signal processing, system architecture, and command and control. These three technical elements, elaborated on below, must be addressed in detail for both Phase I and Phase II. Table 1 provides
a description of expected progress in each phase for these elements.
Signal Processing
Cohering energy from distributed sources requires the ability to determine relative source positioning and timing in the absence of GPS as well as correcting for acoustic channel propagation and multi-path. Possible signal processing approaches include utilizing network
transmissions and/or sources of opportunity to determine relative positioning and estimate the channel propagation, deploying adjunct sources as calibration beacons, or using high-fidelity modeling and acoustic tomography.
System Architecture
The TEAC program will evaluate power, platform mobility, acoustic source requirements, and cost tradeoffs needed to cohere acoustic energy over the frequency bandwidths and durations described . Cost reduction and system performance will be achieved through the use of
existing vehicles (buoys, wavegliders, underwater autonomous vehicles) or make a strong case that suitable technology does not exist. Proposals should identify technology candidates (including batteries, sources, vehicles, etc.) and details of any integration activity.
Command and Control
The TEAC program will emphasize strategies that increase the probability of source survivability (for example, avoidance of vessel collisions and/or fishing net entanglement). The command and control (C2) technical work will address inter-source communications as well as the semiautomated initiation of the distributed source network. The performers should conduct a modeling effort to examine deployment scenarios and use those scenarios to develop the overall network coordination and automation.
PROGRAM METRICS: The TEAC system should be capable of focusing energy in a single direction within a specified 5 degree sector at the end of the first phase, and capable of multiple (2 or more) focus points with a 25 degree sector at the end of Phase II.
Program Awards
Contracts for the effort were awarded under the “Tactical Exploitation of the Acoustic Channel” program that aims to establish a network of distributed sonars forming one coherent signal. TEAC seeks to form a distributed source network that can combine sonar signals from several distributed emitters into a coherent signal at one location for applications like active sonar, acoustic surveillance, and underwater communications.
The Defense Advanced Research Projects Agency has partnered with Systems and Technology Research and Applied Physical Sciences to build a phased-array sonar technology compatible with unmanned naval vessels. Sonars to result from the project are expected to be installed on small underwater and surface vessels, as well as on surveillance systems deployed on the ocean, the report noted.
References and resources also include:
http://www.farsounder.com/technology/blog/array_processing_vs_scanning_sonar