 International Defense Security & Technology Your trusted Source for News, Research and Analysis
International Defense Security & Technology Your trusted Source for News, Research and Analysis
Related Articles

The GPS system provides critical positioning capabilities to military, civil, and commercial users around the world. The Global Positioning System (GPS), is a global navigation satellite system (GNSS) that provides location and time information in all weather conditions, anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. GPS has become ubiquitous technology that provides real-time positioning, navigation and timing (PNT) data in cars, boats, planes, trains, smartphones and wristwatches, and has enabled advances as wide-ranging as driverless cars, precision munitions, and automated supply chain management.
Precision timing and synchronization is essential to DoD communications, navigation, reconnaissance, and electronic warfare systems. The requirements for timing precision and stability have grown increasingly demanding as systems have evolved towards higher data rates, increased spectrum congestion, and time-dependent encryption algorithms. This demand will continue to grow over the next decade, particularly due to emerging requirements for precision timing in GPS-denied environments and synchronization between system-of-systems components on distributed platforms, says DARPA. “The requirements for timing precision and stability have grown increasingly demanding as DoD systems have evolved towards distributed engagement and surveillance architectures,” says DARPA.
The precise GPS allowed US military to determine accurately the SLBM launch position which was a force multiplier. Precise navigation enabled United States ballistic missile submarines to get an accurate fix of their positions before they launched their SLBMs. The USAF, with two thirds of the nuclear triad, also had requirements for a more accurate and reliable navigation system. To increase the survivability of ICBMs, there was a proposal to use mobile launch platforms (such as Russian SS-24 and SS-25) and so the need to fix the launch position had similarity to the SLBM situation.
However in many environments in which military operates including inside buildings, in urban canyons, under dense foliage, underwater, and underground, have limited or no GPS access. It can be significantly degraded or unavailable during solar storms. To address this problem, DARPA is giving thrust to multiple programs that are exploring innovative technologies and approaches that could eventually provide reliable, highly accurate PNT capabilities when GPS capabilities are degraded or unavailable.
GPS denied and degraded environments
The GPS system provides critical positioning capabilities to military, civil, and commercial users around the world. However, in many environments in which military operates (inside buildings, in urban canyons, under dense foliage, underwater, and underground) have limited or no GPS access. It can be significantly degraded or unavailable during solar storms.
GPS signals are also subject to electronic attacks such as jamming by adversaries. “Threats to military GPS have evolved and improved at a rapid pace — from a proliferation of small-scale commercial jamming devices that can readily be purchased on eBay to large-scale military anti-access/area-denial (A2/AD) capabilities,” said MAJ Christopher Brown, assistant program manager Dismounted PNT within the Assured PNT program.
Apart from jamming by adversaries, GPS signals are also subject GPS-spoofing attacks whereby a malicious entity generates a GPS-like signal designed to mislead GPS receivers. Researchers at Virginia Tech and Cornell University spent more than a year building equipment that can transmit fake GPS signals capable of fooling receivers. The phony receiver was placed in the proximity of a navigation device, where it anticipated the signal being transmitted from the GPS satellite.
The fake signals cause the receiver to estimate its position to be somewhere other than where it actually is, as determined by the attacker. And while early versions were technically very difficult to create, experts say that more modern versions could easily be built with commercial hardware and software easily accessible online. The amount of power needed for GPS spoofing is also not very high, and Dr Humphreys predicts that a transmitter would need just one-watt of power for spoofing.
GPS receiver’s accuracy degrades quickly one its satellite signal is lost. “Within 30 seconds of a GPS shut-down, a GPS receiver would only be able to specify that it was somewhere within an area the size of Washington, DC. An hour of GPS shutdown would expand the area of uncertainty to more than the size of Montana. It would not take long for warfighters in deserts and sailors at sea to lose their bearings; for the critical synchrony in radiofrequency, electronic and photonic signaling to disappear; and for high-precision munitions to be stripped of the astounding navigational control that has changed the character of modern warfare,” explains DARPA.
To address this problem, several DARPA programs are exploring innovative technologies and approaches that could eventually provide reliable, highly accurate PNT capabilities when GPS capabilities are degraded or unavailable.
The latest PNT technology, being developed through DARPA and the Army Emerging Technologies Office, will no longer depend on GPS technology, which requires sending and receiving signals to satellites and therefore can be disabled by electromagnetic and cyber space interference.
Instead, the new PNT systems will rely on cold-atom interferometry technology reinforced when possible by long distance commercial electromagnetic waves, such as those emitted by televisions, or naturally occurring ones, such as those emitted by lightning strikes. According to DARPA, Hardware technology allows a cloud of atoms to be encapsulated in a sensor pod, while software algorithms measure the motion of these atoms in order to determine location and time
DARPA’s current PNT portfolio includes five programs, focused wholly or in part on PNT-related technology:
Program 1: Adaptable Navigation Systems (ANS)
Most current navigation systems rely on a combination of GPS and an inertial measurement unit (IMU), and often one or more additional purpose-built aiding sensors, to provide accurate PNT information. However, such systems typically use custom filter solutions for their specific sensors and measurement sources, leading to point solutions that are inflexible to new capabilities, new threats, or mission challenges, according to the agency.
DARPA believes that the quality and robustness of navigation solutions can be significantly enhanced through the use of information extracted from more diverse combinations of aiding sensors, such as LiDARs, laser rangers, cameras, and magnetometers. Moreover, the agency believes that signals of opportunity (SoOPs) from the existing RF background infrastructure and natural phenomena and new sensors and measurement sources amay prove useful for its ASPN effort.
Adaptable Navigation Systems (ANS) seeks to provide GPS-quality PNT to military users regardless of the operational environment. ANS addresses three basic challenges through its Precision Inertial Navigation Systems (PINS) and All Source Positioning and Navigation (ASPN) efforts:
1) Better inertial measurement units (IMUs) that require fewer external position fixes;
2) Alternate sources to GPS for those external position fixes; and
3) New algorithms and architectures for rapidly reconfiguring a navigation system with new and non-traditional sensors for a particular mission
According to the DARPA announcement, proposed development efforts will ideally lead to system solutions that are: a) adaptable in selecting the optimal set of measurements based on the statistics associated with available navigation inputs; b) flexible to accommodate both synchronous and asynchronous data streams based on available measurements associated with the breadth of possible navigation platforms as well as working with existing sensors; c) extensible to accommodate distributed and/or collaborative navigation processing solutions; and d) scalable to support low size, weight and power (SWaP) implementations.
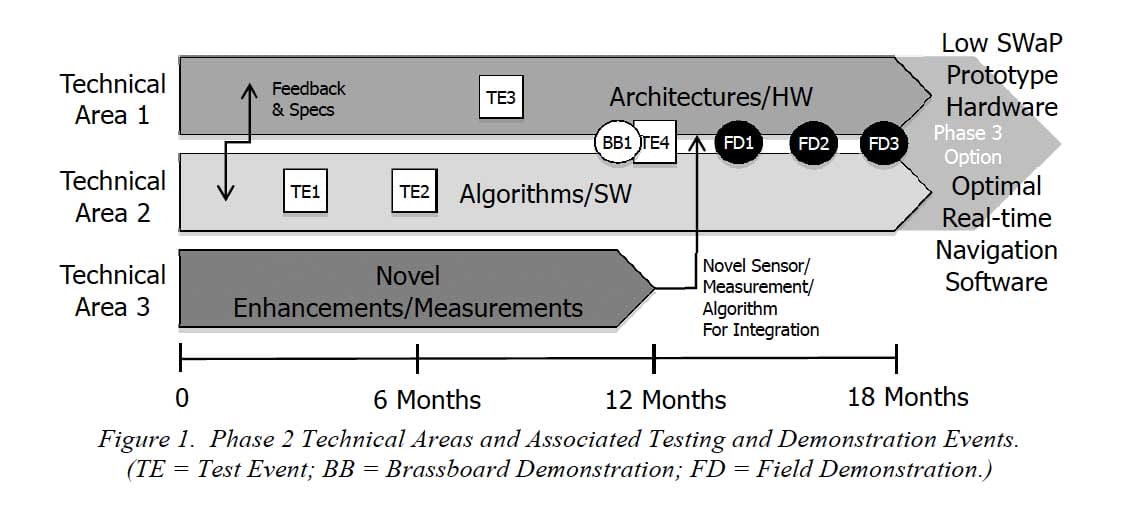
DARPA expects that Phase 2 will produce real-time algorithms fielded on SWaP-representative prototype hardware that will accept an arbitrary set of inputs, regardless of native application of the sensors used, with robustness and quick re-convergence as sensors and measurements are introduced to or removed from the navigation system. STO will evaluate hardware architectures and real-time algorithms relative to government-provided optimized navigation solutions for a given set of sensor and IMU inputs for multiple scenarios, including the potential for sea, air, and ground platforms. Testing will include demonstrating the capability of proposed solutions to achieve real-time transitions from 1) one type of IMU to another (e.g. fiber optic gyroscope to a MEMS gyroscope), 2) one aiding sensor type to another that provides similar information (e.g. stereo camera to a video camera), and 3) the addition of new and/or removal of one or more existing sensors.
The goal is not to wean the military from GPS but to provide equally accurate alternatives in GPS-denied and degraded environments. “People get addicted to GPS and its accuracy,” Haas says. “They’re used to having that accuracy wherever they are. Yet people spend a lot of time indoors, and GPS was not designed to work indoors. How can they get that same level of accuracy indoors? Some of the technology that we are developing may enable that in the future.”
“GPS is the world’s best navigation system and is the best navigation system ever built by man, yet it has some drawbacks,” says Lin Haas, program manager for DARPA’s Strategic Technology Office. “It doesn’t work where it was not designed to work—so it doesn’t work underwater because it was never designed to work underwater. It doesn’t work inside buildings because it was never designed to work inside buildings.
PINS is developing Better inertial measurement units (IMUs) using Cold-atom interferometry
Complementing DARPA’s Micro-PNT program, which is developing chip-scale inertial sensors that are navigation grade or better, PINS is developing an IMU that uses cold atom interferometry for high-precision navigation without dependence on external fixes for long periods of time. Atom interferometry involves measuring the relative acceleration and rotation of a cloud of atoms within a sensor case, with potentially far greater accuracy than today’s state-of-the-art IMUs.
Inertial measurement units or IMU use a combination of accelerometers and gyroscopes (and sometimes magnetometers) to estimate a vehicle’s orientation, velocity, and gravitational forces. An IMU allows a GPS receiver to work when GPS-signals are unavailable, such as in tunnels, inside buildings, or when electronic interference is present. An inertial-measurement unit works by detecting the current rate of acceleration using one or more accelerometers, and detects changes in rotational attributes like pitch, roll and yaw using one or more gyroscopes.
The IMU is the main component of inertial navigation systems used in aircraft, spacecraft, watercraft, drones, UAV and guided missiles among others. In this capacity, the data collected from the IMU’s sensors allow a computer to track a craft’s position, using a method known as dead reckoning. A computer continually calculates the vehicle’s current position. First, for each of the six degrees of freedom (x,y,z and θx, θy and θz), it integrates over time the sensed acceleration, together with an estimate of gravity, to calculate the current velocity. Then it integrates the velocity to calculate the current position.
“The more a platform relies on external signals, the more vulnerable it is to interruption. This is unacceptable for use cases that must always work, such as critical missions on the battlefield,” says Chris Lund, director of product marketing for Honeywell Aerospace. One of the primary benefits of inertial sensors is that they can’t be jammed or spoofed because they don’t rely on external information.
A major disadvantage of using IMUs for navigation is that they typically suffer from accumulated error, including Abbe error. Because the guidance system is continually adding detected changes to its previously-calculated positions, any errors in measurement, however small, are accumulated from point to point. This leads to ‘drift’, or an ever-increasing difference between where the system thinks it is located, and the actual location.
PINS is developing an inertial measurement unit (IMU) that uses cold atom interferometry for high-precision navigation without dependence on external fixes for long periods of time. Atom interferometry involves measuring the relative acceleration and rotation of a cloud of atoms within a sensor case, with potentially far greater accuracy than today’s state-of-the-art IMUs.
Basically, an atom interferometer takes a cloud of about 1 billion Cesium or Rubidium alkali atoms and cools them to a temperature one-millionth of a degree above absolute zero. Lasers then launch those atoms into an ultra-high vacuum enclosure, where their path is measured.
“We use one laser beam to split the cloud of atoms, making them behave like they are in two places at the same point in time. We then use another laser pulse to recombine those atoms and, in that process, are able to determine the interference between the two paths that cloud took,” says U.S. Air Force Lt. Col. Jay Lowell, PINS program manager. “What happens during that time when the two atom waves are separated tells us about the inertial forces that have acted on those atoms. And that inertial force is what we are after in a navigation system.
A company called AOSense has applied cold-atom interferometry to IMUs and demonstrated sensors that support system drifts of 5 meters per hour, by using quantum physical properties to measure the relative acceleration and rotation of a cloud of laser-cooled atoms. The next challenge is shrinking the lasers to microsystem size, because the concept requires three lasers generating five beams to cool and move the atoms through interferometers to determine movement and rotation of the device.
All Source Positioning and Navigation (ASPN) efforts
However, because even long-duration IMUs require an eventual position fix, the ASPN effort is developing sensors that use signals of opportunity. ANS seeks to exploit non-navigational electromagnetic signals–including commercial satellite, cell towers, radio and television signals and even lightning strikes–to provide additional points of reference for PNT. In combination, these various sources are much more abundant and have stronger signals than GPS, and so could provide position information in both GPS-denied and GPS-degraded environments.
“Over the past two decades, the field of robotics has done a lot for extracting features out of imagery and tracking those features as the robot moves through a given environment,” Haas says. “We’ve been building upon those capabilities and using the capabilities for the purposes of navigation.”
Integrating and tuning different sensors, maps and other components into a navigation system is expensive and slow, resulting in platform and mission-specific solutions. To address this integration challenge, the ASPN effort is also developing new fusion algorithms and plug-and-play processing architectures for rapid integration and near-real-time reconfiguration or upgrading of sensors, IMU devices, maps and databases on a navigation system. By allowing flexible combinations of existing and new navigation sensors, ASPN seeks improvements in accuracy, robustness and cost of navigation systems across a wide range of platforms, environments and missions.
Researchers from Georgia Institute of Technology and MIT are working on a project to enable low cost, robust, and seamless navigation solutions for users on any operational platform and in any environment. They are currently developing real-time navigation algorithms and systems needed for rapid integration and reconfiguration of any combination of sensors, by using approaches based on Factor Graphs.
In their framework, each sensor measurement is encoded as a factor. This way provides an adaptable and flexible foundation for any plug-and-play sensor. So far they have tested their system with 19 different sensor types (total 57 sensors: each sensor type includes multiple kinds of sensors) mounted on dismount, ground, and aerial platforms.
With flexible combinations of existing and new navigation sensors, ASPN can produce improvements in accuracy, robustness and cost of navigation systems across a range of platforms, environments and missions. PINS is working towards a final subsystem demonstration in fiscal year 2017. ASPN has completed multiple field demonstrations on air, land and sea platforms, with final demonstrations scheduled in fiscal 2017.
Micro-Technology for Positioning, Navigation and Timing (Micro-PNT)
Micro-PNT is developing high-performance miniature inertial sensors to enable self-contained inertial navigation for precise guidance in the absence of GPS. The program focuses on creating low cost, size, weight and power (CSWaP) solutions for precision navigation in harsh environments relevant to DoD needs.
To achieve this, Micro-PNT is developing sensors that operate under high dynamics (MRIG) and sensors that self-calibrate (PASCAL). Additionally, Micro-PNT is developing fully integrated, miniature timing and inertial measurement units (TIMU) for ubiquitous deployment and miniature atom-based inertial sensors for extended operation (C-SCAN).
Each program takes a unique approach to explore novel fabrication techniques and operational methodologies to create disruptive technological solutions. In each effort, the common objective is to improve inertial sensor precision, dynamic range, and long-term accuracy, while reducing CSWaP.
MRIG
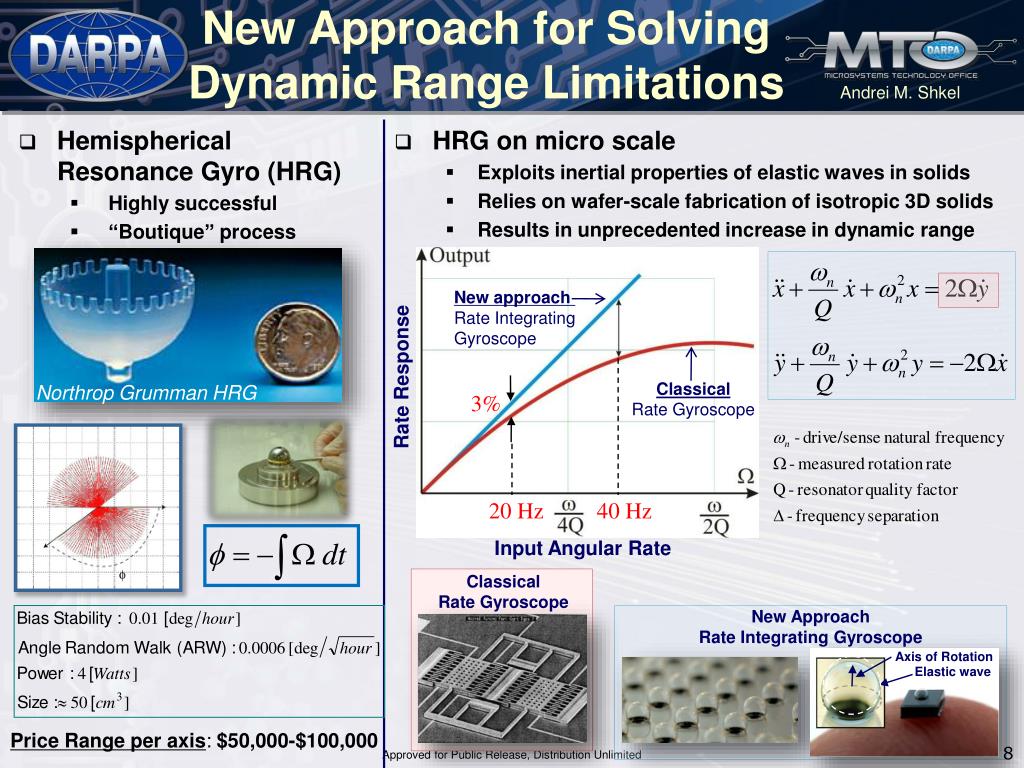
The Microscale Rate Integrating Gyroscope (MRIG) effort seeks to create micromachined vibratory gyroscopes that can be instrumented to directly measure the angle of rotation, extending the dynamic range and eliminating the need to integrate angular rate information.
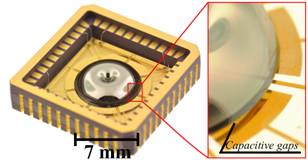
The Microscale Rate Integrating Gyroscope (MRIG) program is developing batch fabricated, 3-dimensional, micromachined vibratory gyroscopes to directly measure the angle of rotation, rather than rotational rate. The continuous, 3D resonators – spheres, inverted wineglasses, and half toroids, are capable of direct angle measurement because an isotropic oscillator maintains its line of oscillation in absolute space, independent of device rotation. This unique feature extends the dynamic range and eliminates the accumulation of error due to integration of angular rate information.MRIGs operate by exciting an elastic wave in a three-dimensional structure that freely precesses in absolute space independent of device rotation.
This rate-integrating mode of operation will extend the dynamic range of vibratory gyroscopes as well as eliminate error accumulation from integration of angular rate information. MRIG has successfully developed innovative methods of batch fabrication of miniature 3-dimensional symmetric shells including wineglass and semi-toroidal structures, as well as other spatially distributed shells with an axis of symmetry capable of direct whole angle operation.
The program is currently executing Phase 2 of three planned phases. Phase 2 performer goals include the delivery of 10 batch fabricated rate integrating gyroscopes with a volume of less than 10 mm3 and performance objectives of a degenerate mode frequency split of less than 5 Hz, ringdown time of greater than 200 s, and degenerate mode damping mismatch of less than 10-3/s. Ultimately, MRIG devices are expected to provide dynamic range of 15,000 deg/sec while preserving the linearity of response to better than 1%, repeatability of the angular gain to better than 0.01 parts per million over 1 hour operation, and Angle Random Walk instability on the level 0.001 deg/√hour.
If successful, MRIG will enable high performance, low cost gyroscopes which, when integrated in Inertial Measurement Units (IMU), will be small enough for adaptation in guided munitions’ platforms, hand-held devices, and add-in portable Guidance, Navigation, and Control (GN&C) units.
PASCAL
The Primary and Secondary Calibration on Active Layer (PASCAL) program addresses the issue of long-term calibration drift of MEMS inertial sensors by providing in situ self-calibration, either physically or electronically. On-chip calibration enables periodic internal error correction to reduce drift and temperature sensitivity, thereby improving performance and eliminating the need for periodic re-calibration data or field component replacement. The objective of the program is to demonstrate self-calibration of gyroscope bias and scale factor with relative stability of 1 ppm over a one-month measurement cycle.
TIMU
The single-chip Timing and Inertial Measurement Unit (TIMU) addresses the challenges associated with integration of MEMS inertial sensors. DARPA is working on tiny timing and inertial measurement units (TIMUs) for backup to GPS in applications including personnel tracking, handheld navigation, small-diameter munitions, and small airborne platforms.
“Our goal for TIMUs is to develop a tactical-grade IMU based on MEMS technology, including simultaneous cofabrication of three gyroscopes and three accelerometers with unprecedented SWaP-C gains,” Lutwak says. “As our TIMU efforts wind down, DARPA is working with other DoD entities to transition the technology.”
Micro-PNT integrates a highly accurate master timing clock into an IMU (Inertial Measurement Unit) chip, making it a “TIMU” (“Timing & Inertial Measurement Unit”) chip. So these TIMU chips for Micro-PNT have an integrated 3-axis gyroscope, a 3-axis accelerometer, and a 3-axis magnetometer. Together with the integrated highly accurate master timing clock, it simultaneously measures the tracked movement and combines that with timing from the synchronized clock. With sensor fusion, it does absolute position tracking, all without external transmitters or transceivers.
The end goals of the TIMU program are the demonstration of a single-chip IMU which maintains an accumulated position error of less than 1 nmi/hour with device volume of less than 10 mm3 and power consumption of less than 200 mW.
C-SCAN
Traditional Si based MEMS gyroscopes have the advantage of C+SWaP, large dynamic range, and fast start-up time, but lack the long-term stability. On the other hand, atomic gyroscopes are potentially more precise and robust, but extremely bulky, require long start-up, and very expensive to manufacture. In this project, we combine the advantages of MEMS fabrication and atomic operation modality to create MEMS-based atomic gyroscopes with the C+SWaP advantages of Si MEMS devices.
The Chip-Scale Combinatorial Atomic Navigator (C-SCAN) program is developing miniature atom-based inertial sensors. Atomic sensors have demonstrated phenomenal accuracy and long-term stability, but are limited in their application due to large CSWaP, requiring wall plug power and a benign, controlled environment. C-SCAN is miniaturizing the physics and reducing the necessary technology into a deployable package. Two approaches are being investigated: Nuclear Magnetic Resonance (NMR) and Atomic Interferometry (AI). AI sensors are much more complex, but simultaneously sense both rotation and acceleration.
Atomic gyroscopes in our implementation, Folded-micro-NMRG, work on the principle of detecting precession of polarized nuclei using optical probing, utilizing Nuclei Magnetic Resonance principle. We explore novel micro scale implementations to control magnetic field, temperature as well as high level integration of optical components and detection electronics. Our approach of assembling these functional elements to a folded backbone structure paves the way to implementing a self sufficient Inertial Measurement Unit while occupying less than 1 cubic inch (20cc) in volume, writes Microsystems Laboratory at the University of California Irvine .
C-SCAN has successfully demonstrated small-scale NMR gyroscopes and AI sensors in controlled environments. However, due to complexity, AI systems still require laboratory-grade lasers, optical systems, and vacuum pumps. To address these limitations, the micro-PNT program is, in parallel, developing enabling component technology for cold-atom microsystems (CAMS). CAMS is developing innovative MEMS and photonic solutions to enable practical deployment of AI sensors in DoD-relevant environments.
Micro-PNT leverages extreme miniaturization made possible by DARPA-developed micro-electromechanical systems (MEMS) technology. Micro-PNT comprises a portfolio of diverse efforts collectively devoted to develop highly stable and precise chip-scale gyroscopes, clocks and complete integrated timing and inertial measurement devices. DARPA researchers have fabricated a prototype with three gyroscopes, three accelerometers and a highly accurate master clock on a small penny sized chip.
Atomic Clocks with Enhanced Stability, or ACES
The ACES program aims to develop portable, battery‐powered atomic clocks with stability, repeatability, and environmental sensitivity approaching that of laboratory‐grade cesium beam frequency standards. This will be accomplished through research, development, and integration of reduced SWaP components and technologies for advanced atomic physics interrogation techniques. These include, but are not limited to, laser‐cooled and magneto‐optically trapped atomic samples, and RF‐trapped ion samples, as well as interrogation of less environmentally‐sensitive microwave and optical transitions
“If ACES is successful, virtually every Defense Department system will benefit,” Lutwak said. ACES seeks to create palm-sized, battery-powered atomic clocks that perform up to 1,000 times better than the current generation. “All of our modern communications, navigation and electronic warfare systems as well as our intelligence, surveillance and reconnaissance systems depend on accurate time-keeping,” Lutwak added.
Success will require record-breaking advances that counter accuracy-eroding processes in current atomic clocks, among them variations in atomic frequencies that result from temperature fluctuations and subtle frequency differences that can occur if the power shuts down and then starts up again. “It will take a collaboration of teams with skillsets from diverse fields, including atomic physics, optics, photonics, microfabrication and vacuum technology to achieve the unprecedented clock stability that we seek,” program manager Robert Lutwak said.
Quantum-Assisted Sensing and Readout (QuASAR)
Quantum-Assisted Sensing and Readout (QuASAR) intends to make the world’s most accurate atomic clocks—which currently reside in laboratories—both robust and portable. QuASAR researchers have developed optical atomic clocks in laboratories with a timing error of less than 1 second in 5 billion years. Making clocks this precise portable could improve upon existing military systems such as GPS, and potentially enable entirely new radar, LIDAR and metrology applications.
Recently the program demonstrated the world’s most accurate clock with a total uncertainty of 2 parts in 10^18 , or about 10,000 times better than GPS clocks. This means that if the clock began ticking at the Big Bang nearly 14 billion years ago it would be accurate to better than one second today. Recent advances in optical atomic systems give promise to a new generation of optical atomic clocks and quantum metrology that stands to transform numerous DoD applications. The Quantum-Assisted Sensing and Readout (QuASAR) program is building on established control and readout techniques from atomic physics to develop a suite of measurement tools that will be broadly applicable across disciplines, helping to address outstanding challenges in physics, materials, biological sciences, inertial navigation and robust global positioning systems.
Typically, the performance of measurement devices is limited by deleterious effects such as thermal noise and vibration. Notable exceptions are atomic clocks, which operate very near their fundamental limits. Driving devices to their physical limits will open new application spaces critical to future DoD systems. Indeed, many defense-critical applications already require exceptionally precise time and frequency standards enabled only by atomic clocks. The Global Positioning System (GPS) and the internet are two key examples.
Measurement systems based on atomic physics benefit from the exquisite properties of the atom. Among these are (a) precise frequency transitions, (b) the ability to initialize, control, and readout the atomic state and (c) environmental isolation. In addition, atomic properties are absolute, and do not “drift” over time. In this sense, atoms are self-calibrated, making them ideal for precision sensing.
QuASAR will push toward fundamental operating limits by developing atom and atom-like sensors that operate near the standard quantum limit (SQL), constructing hybrid quantum sensors that combine the optimal sensing and readout capabilities of disparate quantum systems and entangling multiple sensors/devices to operate below the SQL. These types of devices will find broad application across the DoD, particularly in the areas of biological imaging, inertial navigation and robust global positioning systems.
DARPA’s Precise Robust Inertial Guidance for Munitions (PRIGM)
Additionally, DARPA recently announced a new program related to PNT called “Precise Robust Inertial Guidance for Munitions: Navigation-Grade Inertial Measurement Unit.” This PRIGM program addresses the challenge of providing precise PNT for low-cost, -size, -weight and -power consumption platforms, such as smart bombs and guided munitions, in GPS-denied environments.
The PRIGM program comprises two main thrusts: a near-term transition effort to develop a MEMS-based Navigation-Grade
Inertial Measurement Unit (PRIGM:NGIMU) and fundamental research on Advanced Inertial Micro-Sensors (PRIGM:AIMS). PRIGM:NGIMU performers are developing an interface compatible drop-in replacement for currently deployed tactical-grade MEMS IMUs, while PRIGM:AIMS performers are investigating novel architectures, materials, operating modalities for future inertial sensors that are capable of providing extraordinary navigation performance under extreme operating conditions.
Honeywell Aerospace (Phoenix, Arizona) and Northrop Grumman are currently working with the U.S. Defense Advanced Research Projects Agency (DARPA) on its Precise Robust Inertial Guidance for Munitions (PRIGM): Navigation-Grade Inertial Measurement Unit (NGIMU) program to further develop advanced IMUs.
The goal of the PRIGM/NGIMU project is to “develop a MEMS [microelectromechanical system]-based navigation-grade IMU that has a mechanical/electronic interface compatible with a drop-in replacement for existing tactical-grade IMUs on legacy DoD platforms,” explains Dr. Robert Lutwak, program manager for DARPA’s Microsystems Technology Office.
The PRIGM program also entails “basic research efforts for advanced inertial micro sensors (AIMS),” Lutwak continues. “PRIGM/AIMS explores alternative technologies and modalities for inertial sensing – including photonic and MEMS-photonic integration, as well as novel architectures and materials systems.”
Ultimately, PRIGM/NGIMU is expected to “identify promising candidate technologies for further development as high-performance inertial sensors for long-duration missions and deployment in extreme environments,” Lutwak says. As part of this effort, Honeywell is working to improve the performance of its MEMS HG1930 IMU by three orders of magnitude while maintaining its size, weight, and power consumption.
DARPA-funded inertial sensors from Honeywell promise greater accuracy reported in Jan 2021
Honeywell, with funding from the U.S. Defense Advanced Research Projects Agency (DARPA), is creating the next generation of inertial sensor technology that will one day be used in both commercial and defense navigation applications. Findings gathered in Honeywell labs have shown the new sensors to be greater than an order of magnitude more accurate than Honeywell’s HG1930 inertial measurement unit (IMU) product, a tactical-grade product with more than 150,000 units currently in use.
An IMU uses gyroscopes, accelerometers and electronics to give precise rotation and acceleration data to enable a vehicle system to calculate where it is, what direction it is going and at what speed, even when GPS signals aren’t available. There are various types of IMUs on the market, and some — like the next-generation version currently under development — use sensors based on micro-electromechanical systems (MEMS) technology to precisely measure motion.
“Typically, MEMS inertial sensors have been on the lower end of the performance scale, but this latest milestone shows we are changing that paradigm,” said Jenni Strabley, director of offering management for Inertial Sensors, Honeywell Aerospace. “With this next-generation MEMS technology, we’re increasing performance without having to significantly change the size or weight of the IMU. This is a game-changer for the navigation industry, where customers need highly accurate solutions but cannot afford to compromise on weight or size.”
Over the past few years, Honeywell has been working with DARPA to develop the next generation of high-precision navigation-grade IMU technology, under the Precise Robust Inertial Guidance for Munitions: Thermally Stabilized Inertial Guidance for Munitions program. The new MEMS sensors will use different sensor designs and electronics to enable higher performance. They will serve a broad range of applications in autonomous land and air vehicles for both military and commercial customers, including future urban air mobility aircraft.
“Now that we have demonstrated that MEMS is capable of reaching these incredibly precise performance levels, it is the perfect time to start talking with potential users about how this technology could help their applications,” Strabley said. “We believe this new technology will have a variety of applications, such as onboard future vehicles that will fly in urban environments where lightweight, extremely precise navigation is critical to safer operations. Additionally, there are other applications that haven’t been invented yet but may be enabled by these types of technology innovations.”
Commercial sales of an IMU containing these next-generation sensors are still several years away, but one of the first products using this new technology is expected to be more than 50 times more accurate while roughly the same size as Honeywell’s IMU. Honeywell has long been a pioneer in MEMS-based IMUs, including the HG1930. Honeywell’s lineage in navigation dates to the 1920s and since then Honeywell has developed and manufactured high-performance navigation solutions found on many aircraft and other vehicles worldwide.
Northrop Grumman to develop navigation-grade MEMS IMU for DARPA programme
The US Defense Advanced Research Projects Agency (DARPA) has selected Northrop Grumman to develop a navigation-grade, advanced microelectromechanical systems (MEMS) technology-based inertial measurement unit (IMU). Under a $6.27m contract, Northrop will develop a prototype IMU that senses acceleration and angular motion, providing data used by vehicle control systems for navigation.
DARPA’s programme aims to develop a cost-effective, small, navigation-grade IMU that integrates advanced MEMS inertial sensors with minimised weight, size and power consumption. The new IMU is set to be developed as part of DARPA’s precise robust inertial guidance for munitions navigation-grade inertial measurement unit (PRIGM: NGIMU) programme.
Northrop Grumman programme director Alex Fax said: “In particular, making inertial navigation units smaller and lighter than ever before will make a huge difference in GPS-denied and highly contested environments.” The contract also includes options, valued at $5.3m, under which the MEMS-based IMU will be assessed for meeting size, weight, power and performance requirements. “Making inertial navigation units smaller and lighter than ever before will make a huge difference in GPS-denied and highly contested environments.”
HRL Labs to develop inertial sensor tech for DARPA
The U.S. Defense Advanced Research Projects Agency (DARPA) has awarded HRL Laboratories LLC $4.3 million to develop vibration- and shock-tolerant inertial sensor technology that enables future system accuracy needs without using GPS. “The ATLAS project will deliver a comprehensive approach to breaking performance and cost, size, weight and power barriers in inertial sensor technology that prevent robust, GPS-independent, military positioning, navigation and guidance,” said Logan Sorenson, principal investigator and research staff member in HRL’s Sensors and Materials Laboratory.
ATLAS will combine intimate locking of a micro-electro-mechanical systems (MEMS) Coriolis Vibratory Gyroscope (CVG) sensor with an atomically stable frequency reference in order to exploit the intrinsic accuracy of the atomic hyperfine transition frequency. “The engineering challenge lies in developing a system architecture to transfer the stability from the atomic reference to the CVG sensor without introducing unintended noise,” Sorenson said. “We are very excited to explore this novel approach to addressing long-standing precision navigation need faced by the U.S. military.”
“Position, navigation, and timing are as essential as oxygen for our military operators,” said DARPA Director Arati Prabhakar. “Now we are putting new physics, new devices, and new algorithms on the job so our people and our systems can break free of their reliance on GPS.”
References and resources also include:
http://www.afcea.org/content/?q=Article-finding-your-way-time
http://www.contractrandd.com/?p=1945
https://www.fbo.gov/utils/view?id=dc19d34f9621cfded652e6bf08f1a402
https://www.wired.com/2008/09/researchers-dup/
http://www.dailymail.co.uk/sciencetech/article-4781714/Is-Russia-developing-GPS-spoofing-system.html
http://gpsworld.com/darpa-advances-on-many-fronts-to-reduce-reliance-on-gnss/
http://mil-embedded.com/articles/backup-pnt-methods-essential-gps-denied-environments/