In recent years, underground settings are becoming increasingly relevant to global security and safety. Factors such as rising populations and urbanization are requiring military and civilian first responders to perform their duties in below-ground conditions, in human-made tunnels, underground urban spaces, and natural cave networks. Military and Security forces also have interest in developing robots to target tunnels dug by Militaries and terrorists . Criminals, terrorists and military have been using tunnels since long time to evade detection as surface based detection methods are ineffective underground .The tunnel threat is also a serious and growing concern to U.S and Mexico, as they enable human trafficking and smuggling of drugs and weapons across the border.
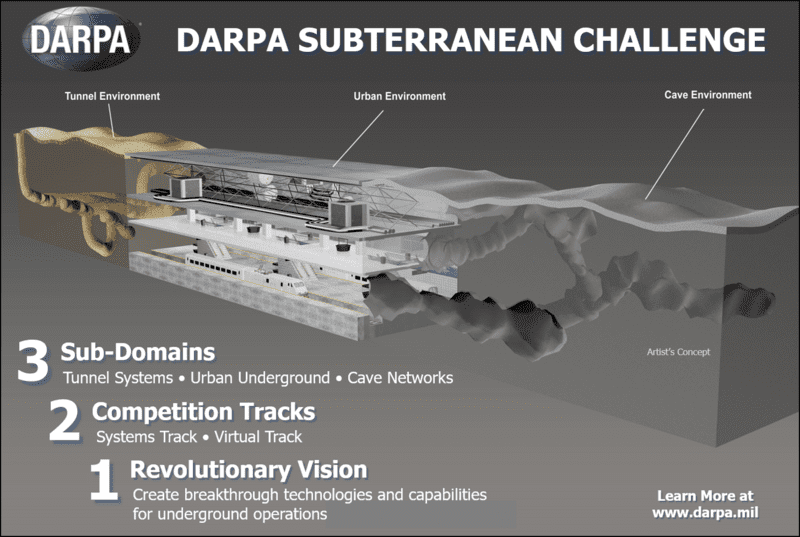
DARPA first announced its Subterranean (SubT) Challenge in 2018 with aim to explore new approaches to rapidly map, navigate, and search underground environments. Teams from around the world were invited to propose novel methods for tackling time-critical scenarios through unknown courses in mapping subsurface networks and unpredictable conditions, which are too hazardous for human first responders. The underground environments DARPA wanted to test in the competition included human-made ones, like subway systems, sewers, and mines, and natural ones, like caves and tunnels.
“One of the main limitations facing warfighters and emergency responders in subterranean environments is a lack of situational awareness; we often don’t know what lies beneath us,” said Timothy Chung, program manager in DARPA’s Tactical Technology Office (TTO). “Building an accurate three-dimensional picture is a key enabler to rapidly and remotely exploring and searching subterranean spaces.”
The US Defense Advanced Research Projects Agency (DARPA) developed advanced technologies and methodologies for 3D mapping and surveying of underground environments under the agency’s Subterranean (SubT) Challenge, which aims to equip troops and first responders with superior capabilities to effectively execute missions underground. The agency explored the use of mobile robots for search and rescue to avoid the dangers miners and explorers. “We’ve reached a crucial point where advances in robotics, autonomy, and even biological systems could permit us to explore and exploit underground environments that are too dangerous for humans,” said TTO Director Fred Kennedy.
The second phase of the DARPA Subterranean Challenge concluded in Feb 2020 with the completion of the Urban Circuit. Similar to the challenge’s first phase, the urban circuit challenged teams to use robots and drones to rapidly map, navigate and search underground environments. Taking first in the competition was CoSTAR, a 12-robot, 60-person team led by NASA’s Jet Propulsion Laboratory (there were also winners declared for a separate, virtual competition).
Two previous scored events – Tunnel and Urban Circuits – featured both Virtual and Systems Competitions. DARPA has made the difficult decision to proceed only with the Virtual Competition for the Cave Circuit, due to safety considerations surrounding COVID-19.
The Final Event, planned for the latter half of 2021, will combine elements from each of the three subdomains. As with the previous two scored circuit events, the Systems and Virtual Competitions will take place in parallel with DARPA-funded and self-funded teams competing side-by-side. Teams in the Systems Competition will compete for up to $2 million in the Final Event Systems Competition. Teams in the Virtual Competition will compete for up to $1.5 million in the Virtual Final Event Virtual Competition.
Tunnel detection and mapping is becoming a critical capability for the U.S. military as well as the Department of Homeland Security. According to the Science and Technology directorate at DHS, finding illicit tunnels and underground passages along the Southern border is largely based on “random tips and laborious human intelligence” and not on detection technology.