The GPS system provides critical positioning capabilities to military, civil, and commercial users around the world. The Global Positioning System (GPS), is a global navigation satellite system (GNSS) that provides location and time information in all weather conditions, anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. GPS has become ubiquitous technology that provides real-time positioning, navigation and timing (PNT) data in cars, boats, planes, trains, smartphones and wristwatches, and has enabled advances as wide-ranging as driverless cars, precision munitions, and automated supply chain management.
Precision timing and synchronization is essential to DoD communications, navigation, reconnaissance, and electronic warfare systems. The requirements for timing precision and stability have grown increasingly demanding as systems have evolved towards higher data rates, increased spectrum congestion, and time-dependent encryption algorithms. This demand will continue to grow over the next decade, particularly due to emerging requirements for precision timing in GPS-denied environments and synchronization between system-of-systems components on distributed platforms, says DARPA. “The requirements for timing precision and stability have grown increasingly demanding as DoD systems have evolved towards distributed engagement and surveillance architectures,” says DARPA.
The precise GPS allowed US military to determine accurately the SLBM launch position which was a force multiplier. Precise navigation enabled United States ballistic missile submarines to get an accurate fix of their positions before they launched their SLBMs. The USAF, with two thirds of the nuclear triad, also had requirements for a more accurate and reliable navigation system. To increase the survivability of ICBMs, there was a proposal to use mobile launch platforms (such as Russian SS-24 and SS-25) and so the need to fix the launch position had similarity to the SLBM situation.
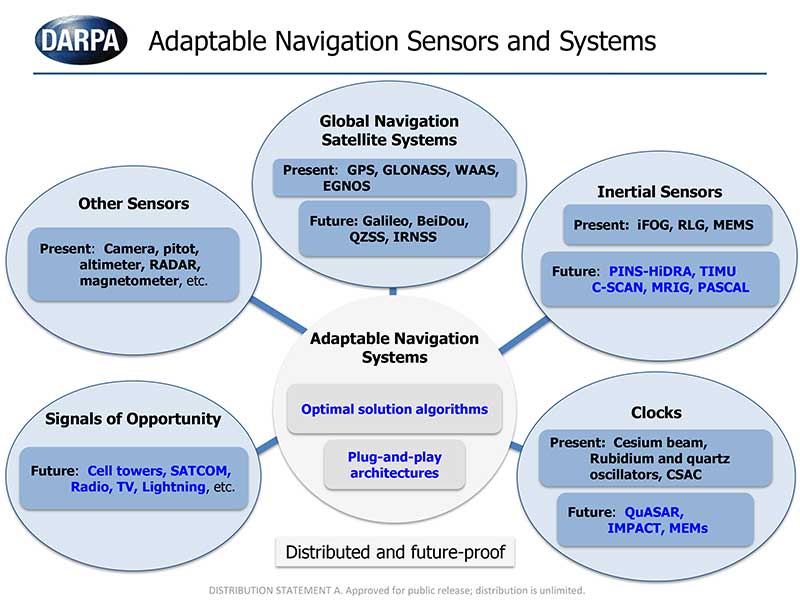
However in many environments in which military operates including inside buildings, in urban canyons, under dense foliage, underwater, and underground, have limited or no GPS access. It can be significantly degraded or unavailable during solar storms. To address this problem, DARPA is giving thrust to multiple programs that are exploring innovative technologies and approaches that could eventually provide reliable, highly accurate PNT capabilities when GPS capabilities are degraded or unavailable.